基于DSP的人脸识别系统设计
2.1 TVP5147芯片
系统上电时,DSP首先对TVP5147初始化,其通过I2C总线实现,DSP自带I2C总线控制器。芯片I2C地址是由芯片引脚I2CA的电平控制的,如该引脚接高电平,则I2C写地址为0xB8,否则为OxBB。
假如系统初始化为从Y[9..O]端口输出10位的YUV混合视频数据,则可知道其输出符合以下时序,如图5所示。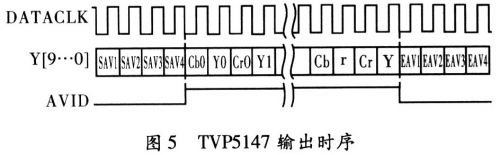
图中第一行为DATACLK信号,其为TVP5147芯片提供的数据时钟信号,第二行为数据Y[9…0],当每一行图像开始之前,会有4个SAV信号,同样,结束之后也有4个EAV信号,如图5所示,数据是YCbCr格式,每个像素点的数据为4个数据组成,一次为Cb,Y,Cr,Y。而由图5中可以看出AVID信号为高电平时,表明当前的数据为有效数据。这为CPLD采集有效数据提供了参考信号。同时TVP5147芯片还输出FID信号,该信号为奇偶场指示信号。
2.2 CPLD读写SRAM
存储器选择了DS1265AB,它是SRAM存储器,具有存储速度快的优点,并能够在系统掉电时保存数据10年。DS1265具有1 MB的容量,20根地址线,8根数据线,另有WE,OE,CE信号输入端。
CPLD选用EPM7128具有价格便宜、计数频率高等优点。将存储器SRAM接到CPLD的IO引脚上,配合时序便能达到对SRAM读写的要求,原理图,如图6所示。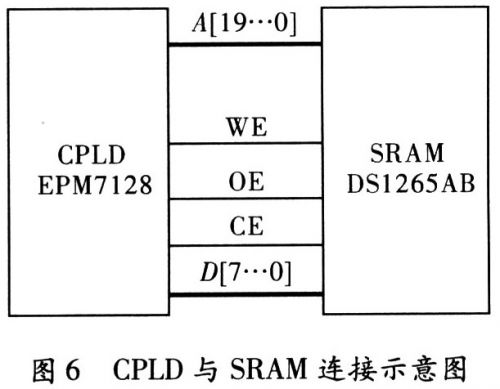
编写CPLD程序使得输出时序满足SRAM的存储要求,当然对于设计的具体要求,利用两片SRAM分别存储奇偶场的数据,SRAM的切换是由奇偶场信号FID控制多片74HC245实现的,详细过程,如图7所示。当FID处于高电平时,此时M1和M4使能,此时CPLD将地址信号CPLDaddr输入SRAM1中,DSP将地址信号DSPaddr输入至SRAM2中,同时M6和M8使能,由图中可以看出,此时CPLD正向SRAM1写入数据,而DSP正从SRAM2中读取数据,同时M10使能,CPLD的信号CPLDctl控制SRAM1的读写,而DSP的信号DSPctl控制SRAM2的读写,当FID转为低电平时,正好将SRAM1和SRAM2实现了交换。以这种方式构建的系统,能同时将视频的两场数据同时记录下来,实现了CPLD和DSP的有机结合。至此CPLD的任务就是将有效的图像数据存储到对应的SRAM中,当TVP5147芯片AVID引脚上升沿时,置地址为初始值00h,即从首地址依次往后写入。每一个数据时钟信号DATACLK上升沿时将TVP5147输出的Y[9…2]存储到当前地址单元,Y0和Y1位舍弃,因为所选择的SRAM数据位为8位,当放弃Y0和Y1位后,降低了图像数据的精度,但对识别效果的影响却很小,然后随着DATACLK每次上升沿的来临,CPLD将地址单元加1,这样实现每一场数据的写入。当切换至另一场数据时,执行的过程相同,只是存储的对象被74HC245强制更改,如此循环,便可将每场数据记录下来。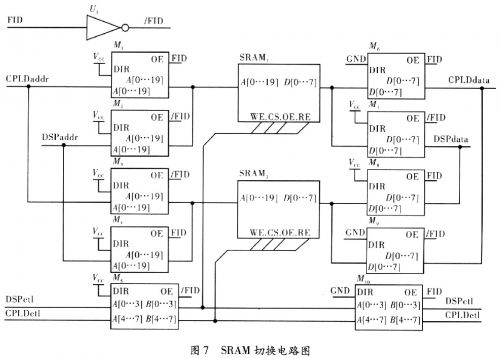
2.3 图像输出系统的设计
系统设计时为了减轻负担,采用电视监控的方法,将小型电视机通过TI公司的视频编码芯片THS8135连接至DSP总线,将得到的YUV数据通过THS8135直接输出至电视AV的视频接收端,并且通过DSP可以将一些信息显示到电视屏幕上,这样使得识别的过程更加人性化。
3 系统软件设计
系统硬件调试成功后,需要提供一定的软件算法等,以实现软件和硬件的结合,在此设计中,SRAM是扩展在DSP处理器EMIF上的,DSP处理器通过读信号的触发将有效奇偶场数据分别存储为两个一维数组,以供处理。
3.1 DSP的图像预处理
TVP5147芯片输出的图像数据并非RGB格式,而是以YUV格式输出的。需要通过DSP处理器转换成RGB格式,才能进行图像的预处理,转换公式如式(4)所示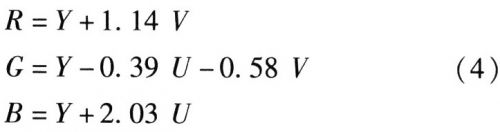
DSP将图像数据读入内存空间,然后对其进行运算,将得到的RGB分别放到对应的存储单元,并算出灰度值Gray,运算公式如式(5)所示
将最后得到的灰度值存放到对应的数组当中。每张图片由两场图片构成,所以完整的图片分辨率为720×576。但是对于系统本身无需对其每一个像素都进行转换,所以截取其中320×240进行存储,这样每场的分辨率为320×120,大大降低了由YUV到灰度图像预处理和脸部定位的时间,提高了系统的性能。
3.2 人脸判别流程
将得到的320×240的图片经过人脸的检测后,将截取人脸的部分作为人脸样本。设计时,人脸的所有样本都将在显示器上显示出来,降低了人脸错误检测的可能,一定程度上提高系统的准确性。
人脸的样本分辨率为24×24,作为576维的一维向量输入至PCA。图8(a)为计算PCA投影矩阵的流程图,图8(b)为KNN分类器的工作流程图,其中训练样本经过PCA投影后的数值,不需要在每次识别中重新计算,可以作为初始化时的计算,也可存储于掉电非易失介质中,如Flash存储器中,可以提高设备的运行效率,降低运算量。
如图8所示,KNN分类器可以判断最接近的分类,但是并不能拒绝分类,于是产生了任何人的脸都将被分到内置样本集的一类中。这样的分类方式是不可取的,所以必须加入是否拒绝的判定,流程图如图9所示。
如流程图中显示,当样本点经过PCA降维后,输送至KNN分类器进行分类,所得到的结果一定可以判定为第K类,此时不能急于定论,先求出待测点与K类标号的样本点的欧氏距离之和sum。定义两个阈值a和b,如果sum<a值则判定为第一类;如果sum>b值则判定为拒绝类;如果sum介于a和b值之间,则引入精度控制量accuracy,计算出sum与a的差值,如若小于精度控制量accuracy,则判定为第K类,否则拒绝分类。由这样的过程,间接解决了样本错分和无法判否的问题。
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)