基于DSP+CPLD可重构数控系统的设计
输出S,方向判别信号J,通过一个16 位可逆计数就可以实现对伺服装置的位置检测,实现位置伺服控制系统的控制。
3、控制算法的设计
(1).控制模型
数控机床的最高运动速度、跟踪精度、定位精度等重要指标均取决于驱动及位置控制系统的动态与静态性能。因此,研究与开发高性能的驱动系统及位置控制系统,一直是研究数控机床的关键技术之。日前数控机床位置伺服控制仍然普遍应用经典控制方法,如比例型或比例一积分型等算法,其优点是算法简便,易于实现,但存在着控制参数的适应性差、抗十扰能力不强等缺陷。为了适应制造业对高效率地生产高质量产品日标的追求以及对形状愈来愈复杂零件的加工需要,要求不断地改善与提高位置伺服系统的稳态精度、动态响应特性,对系统参数变化的自适应性和抗干扰性,因而采用并发展先进的控制技术是必然趋势。可惜的是,目前提出的诸多控制算法中,具有实用价值的技术极少,主要表现在:①受算法计算量等限制,难以满足控制的实时性要求;②控制理论在参数设计及稳定性分析等方面不完善;③建模误差对控制品质的限制。
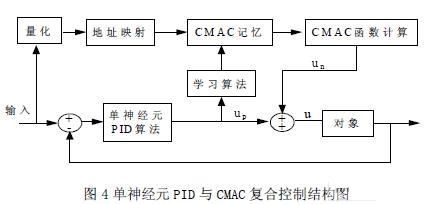
本文利用神经网络的自学习功能,设计了一种在线单神经元PID 与CMAC 并行控制智能型位置控制器,并将之用到数控系统的实时控制中,取得了很好的控制效果,控制模型结构如图:
(2)仿真和实现
采用的单神经元PID及CMAC 相结合的复合控制算法,完成对位置伺服控制器典型输入斜坡输入响应的仿真实验。图5 是位置伺服系统的单位斜坡输入在输入端加入10%的阶跃扰动后,两种控制算法的输出曲线图,通过对图形的分析,可以看出,单神经元PID 与CMAC相结合控制算法比常规PID 控制算法有更小的跟随误差,和更好的抗干扰能力。这个在位置伺服控制系统中更为重要。

4、结束语
利用计算控制功能强大的DSP 芯片构建了数控系统平台,应用CPLD 解决了系统不同应用场合逻辑电路变化的问题,从硬件上实现了可重构性。控制算法较常规PID 控制有更好的动态特性、控制精度、抗干扰能力,而且具有自适应功能。该系统是一种开放的系统,可以使用户很方便的不断进行软、硬件升级,一定时间内跟上数控技术发展的步伐。
发布者:小宇
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)