基于DSP的混合悬浮控制系统的硬件设计
时间:01-13
来源:作者:刘同娟 马向国 北京物资学院
点击:
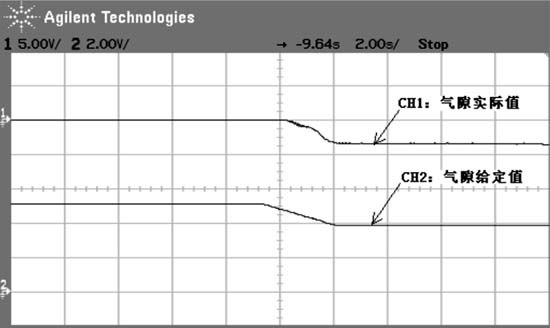
实验结果表明该硬件设计能够实现电磁铁的稳定悬浮。
结论
与传统的纯电磁悬浮系统相比,电磁和永磁组成的混合悬浮系统在相同悬浮功率的情况下可实现大气隙悬浮,即可达到20mm左右的悬浮气隙,这可降低车载蓄电池容量和重量,降低列车的自重,增加有效载荷,因而可以降低轨道精度要求,从而降低轨道工程造价。该系统采用以TMS320LF2407A为核心的悬浮控制电路,具有非常快的数据处理能力,克服了模拟控制器和以单片机为核心的数字控制器的缺陷。通过实验实现了系统的稳定悬浮,验证了设计的合理性。
参考文献:
[1]Liming Shi, Zhengguo Xu, Nengqiang Jin, Shaohui Xu. Decoupled Control for the Hybrid-Magnets used in Maglev System with Large Air-gap. LDIA2003:267-270.
[2] Zhengguo Xu, Nengqiang Jin,Liming Shi and Shaohui Xu. Maglev System with Hybrid-excited Magnets and an Air-gap Length Control. Maglev 2004:1019-1023.
[3]Kinjiro Yoshida, Ju-Lee. 3-D FEM Field Analysis in Controlled-PM LSM for Maglev Vehicle[J].IEEE.Trans. 1997,33(2):2207-2210.
[4] Mir Behrad Khamesee, Norihiko Kato, Yoshihiko Nomura. Design and control of a microrobotic system using magnetic levitation [J]. IEEE.Trans. 2002,7(1):1-14.
[5] Kinjiro Yoshida, Testnao Umino. Dynamics of the propulsion and levitation systems in the controlled-PM LSM maglev vehicle[J]. IEEE.Trans. 1987,MAG-23(5):2353-2355.
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)