基于DSP Builder的行车道检测的实现
时间:11-11
来源:作者:芮晴波
点击:
建立了.mdl文件之后,在Simulink中对其进行系统算法级仿真。设置Matlab各项参数和Simulink仿真参数,因为本设计采用图片的像素是640×480,所以设置仿真时间为307 201s(所有的像素数量加1)。
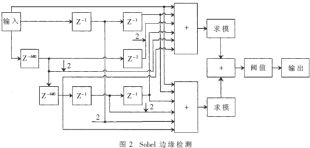
测试表明,仿真结果符合要求,整个系统算法级设计是正确的。图4为原始的彩色图像,图5为经过水平边缘检测和垂直边缘检测后没有经过阈值选取的图像,图6为经过阈值选取后的二值图像。Sobel算子不像普通梯度算子那样用两个像素的差值,而是采用两列或两行像素灰度加权和的差值来表示,因此有以下两个优点[4]。

(2)由于它是相隔两行或两列之差分,故边缘两侧的元素得到了增强,边缘显得粗而亮。
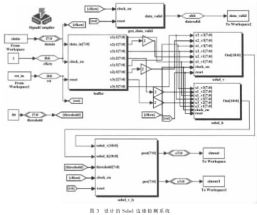
使用Modelsim进行功能仿真,主要是调用.tcl 文件对RTL 级的VHDL 代码仿真。由于Simulink 的仿真是算法级的,而此仿真是针对硬件结构的,两者之间可能存在软件理解上的差异,所以对RTL 级VHDL 代码的仿真是必要的。仿真结果和系统级仿真一致。编译生成.pof 文件,下载到目标芯片中,从而完成整个边缘检测模块的设计。
参考文献
[1] 贾永红.计算机图像处理与分析[M].武汉:武汉大学出版社,2002.
[2] 李弼程,彭天强,彭波.智能图像处理技术[M].北京:电子工业出版社,2004.
[3] 潘松,黄继业,王国栋.现代DSP技术[M].西安:西安电子科技大学出版社,2003.
[4] 刘禾.数字图像处理及应用[M].北京:中国电力出版社,2005.
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)