基于DSP控制的三电平变频器的研究
时间:08-10
来源:
点击:
0 引言
三电平逆变器相对于传统的两电平而言,它可以使主开关器件的电压降低一半。由于输出多了一个电平,可以使du/dt 降低一半,从而使输出电压谐波减小,有利于实现输出电压波形的正弦化,特别适合于高压大容量的电力电子变换系统。它普遍采用空间电压矢量脉宽调制的控制策略,将DSP数字控制技术应用于三电平逆变器,不仅简化了系统的硬件结构,提高了系统性能,还可以实现系统的优化控制。
1 系统结构
1.1 系统的主电路结构
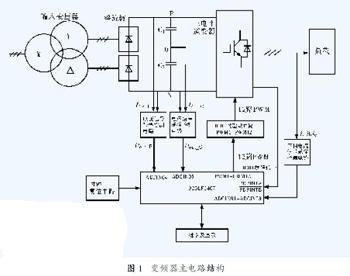
图1为变频器主电路结构图,它大体上由4 部分组成:二极管组成的AC/DC整流器;IGBT 构成的DC/AC逆变器;电压和电流信号采样检测电路和由DSP 组成的控制电路。主电路采用了传统的交-直-交变频结构,整流部分采用12 脉波二极管整流电路,逆变部分采用二极管箝位逆变电路,它是由日本学者Ajura Nabae 教授于1981 年提出来的,并且得到了广泛应用。这种电路通过多个功率器件串联,按一定的开关控制产生需要的电平级数,在输出端合成相应的正弦波。
由于箝位二极管把开关器件两端的电压限制在直流母线电压的一半,所以相对于两电平逆变器,三电平电路中的开关器件所承受的电压应力大大减轻,而输出功率增加了一倍。
1.2 驱动电路的设计
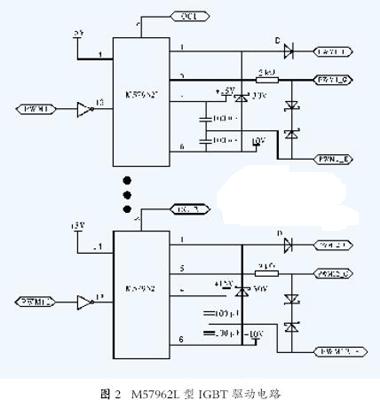
IGBT 驱动电路选择的合理性和设计的正确性对功能的实现极其重要。IGBT 的通态电压、开关时间、开关损耗、承受短路能力等参数均与门极驱动条件密切相关。
IGBT 的驱动电路包括电气隔离和晶体管放大电路两部分,多采用专用的混合集成驱动器,常用的有三菱公司的M579系列(如M57962L 和M57959L)和富士公司的EXB系列(如EXB840、EXB841、EXB850和EXB851),其内部具有退饱和检测和保护环节,当发生过电流时能快速响应,慢速关断IGBT,并向外部电路给出故障信号。本次设计选用三菱公司的M57962L,正驱动电压均为+15V左右,负驱动电压为-10V,如图2所示。本次设计共有12路这样的驱动。
2 变频器设计基本原理
2.1 三电平空间电压矢量PWM(SVPWM)
SVPWM控制技术最初源于电动机磁链跟踪技术。这种方法是从电动机的角度出发,其目标是使交流电动机产生圆形磁场。在交流电机调速系统中,为了产生恒定的电磁转矩,必须保证定子电流产生圆形旋转的磁场,这种以产生圆形旋转磁场为目标,合理控制开关导通和关断的PWM控制就是磁链跟踪技术。磁链的轨迹是靠电压空间矢量相加得到,因此
这种控制方法也称为电压空间矢量控制。
当用三相平衡的正弦电压向交流电动机供电时,电动机的定子磁链空间矢量幅值恒定,并以恒速旋转,磁链矢量的运动轨迹形成圆形的空间旋转磁场(磁链圆)。因此如果有
三电平电压型逆变电路如图3 所示。三电平逆变器的每一个桥臂上有4 个开关管、4个反向恢复二极管和2个箝位二极管。
通过控制开关管Vi1、Vi2、Vi3、Vi4(其中i=a、b、c) 的开通和关断可以在该i桥臂输出三种不同的电平,即Udc/2、0、- Udc/2。当一个桥臂上Vi1、Vi2 两管导通,Vi3、Vi4两管关断时,开关状态Si为1,桥臂输出电压为Udc/2;Vi2、Vi3两管导通,Vi1、Vi4两管关断时,开关状态Si为0,桥臂输出电压为0;Vi3、Vi4两管导通,Vi1、Vi2两管关断时,开关状态Si为-1,桥臂输出电压为- Udc/2,每相的开关状态有3种即1、0、-1。因此三相三电平逆变器有27 种开关状态,其中有效的有19种,称为基本电压空间矢量。按照空间矢量幅值大小可分把基本电压空间矢量为四类:零电压空间矢量(零矢量)v0;小电压空间矢量(小矢量)v1、v4 、v7、v10、v13、v16;中电压空间矢量(中矢量)v3、v6、v9、v12、v15、v18;大电压空间矢量(大矢量)v2、v5、v8、v11、v14、v17。其中零电压空间矢量对应三个开关状态(1 1 1)、(0 0 0)、(-1 -1 -1),每个小电压空间矢量都有两种开关状态,电压空间矢量图如图4所示。
三电平逆变器相对于传统的两电平而言,它可以使主开关器件的电压降低一半。由于输出多了一个电平,可以使du/dt 降低一半,从而使输出电压谐波减小,有利于实现输出电压波形的正弦化,特别适合于高压大容量的电力电子变换系统。它普遍采用空间电压矢量脉宽调制的控制策略,将DSP数字控制技术应用于三电平逆变器,不仅简化了系统的硬件结构,提高了系统性能,还可以实现系统的优化控制。
1 系统结构
1.1 系统的主电路结构
图1为变频器主电路结构图,它大体上由4 部分组成:二极管组成的AC/DC整流器;IGBT 构成的DC/AC逆变器;电压和电流信号采样检测电路和由DSP 组成的控制电路。主电路采用了传统的交-直-交变频结构,整流部分采用12 脉波二极管整流电路,逆变部分采用二极管箝位逆变电路,它是由日本学者Ajura Nabae 教授于1981 年提出来的,并且得到了广泛应用。这种电路通过多个功率器件串联,按一定的开关控制产生需要的电平级数,在输出端合成相应的正弦波。
由于箝位二极管把开关器件两端的电压限制在直流母线电压的一半,所以相对于两电平逆变器,三电平电路中的开关器件所承受的电压应力大大减轻,而输出功率增加了一倍。
1.2 驱动电路的设计
IGBT 驱动电路选择的合理性和设计的正确性对功能的实现极其重要。IGBT 的通态电压、开关时间、开关损耗、承受短路能力等参数均与门极驱动条件密切相关。
IGBT 的驱动电路包括电气隔离和晶体管放大电路两部分,多采用专用的混合集成驱动器,常用的有三菱公司的M579系列(如M57962L 和M57959L)和富士公司的EXB系列(如EXB840、EXB841、EXB850和EXB851),其内部具有退饱和检测和保护环节,当发生过电流时能快速响应,慢速关断IGBT,并向外部电路给出故障信号。本次设计选用三菱公司的M57962L,正驱动电压均为+15V左右,负驱动电压为-10V,如图2所示。本次设计共有12路这样的驱动。
2 变频器设计基本原理
2.1 三电平空间电压矢量PWM(SVPWM)
SVPWM控制技术最初源于电动机磁链跟踪技术。这种方法是从电动机的角度出发,其目标是使交流电动机产生圆形磁场。在交流电机调速系统中,为了产生恒定的电磁转矩,必须保证定子电流产生圆形旋转的磁场,这种以产生圆形旋转磁场为目标,合理控制开关导通和关断的PWM控制就是磁链跟踪技术。磁链的轨迹是靠电压空间矢量相加得到,因此
这种控制方法也称为电压空间矢量控制。
当用三相平衡的正弦电压向交流电动机供电时,电动机的定子磁链空间矢量幅值恒定,并以恒速旋转,磁链矢量的运动轨迹形成圆形的空间旋转磁场(磁链圆)。因此如果有
三电平电压型逆变电路如图3 所示。三电平逆变器的每一个桥臂上有4 个开关管、4个反向恢复二极管和2个箝位二极管。
通过控制开关管Vi1、Vi2、Vi3、Vi4(其中i=a、b、c) 的开通和关断可以在该i桥臂输出三种不同的电平,即Udc/2、0、- Udc/2。当一个桥臂上Vi1、Vi2 两管导通,Vi3、Vi4两管关断时,开关状态Si为1,桥臂输出电压为Udc/2;Vi2、Vi3两管导通,Vi1、Vi4两管关断时,开关状态Si为0,桥臂输出电压为0;Vi3、Vi4两管导通,Vi1、Vi2两管关断时,开关状态Si为-1,桥臂输出电压为- Udc/2,每相的开关状态有3种即1、0、-1。因此三相三电平逆变器有27 种开关状态,其中有效的有19种,称为基本电压空间矢量。按照空间矢量幅值大小可分把基本电压空间矢量为四类:零电压空间矢量(零矢量)v0;小电压空间矢量(小矢量)v1、v4 、v7、v10、v13、v16;中电压空间矢量(中矢量)v3、v6、v9、v12、v15、v18;大电压空间矢量(大矢量)v2、v5、v8、v11、v14、v17。其中零电压空间矢量对应三个开关状态(1 1 1)、(0 0 0)、(-1 -1 -1),每个小电压空间矢量都有两种开关状态,电压空间矢量图如图4所示。
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)