基于AT89C51+DSP的双CPU伺服运动控制器的研究
时间:05-26
来源:哈尔滨理工大学学报 作者:荀尚峰,杜坤梅,万筱剑,邓浩
点击:

图6 总线控制模块流程图


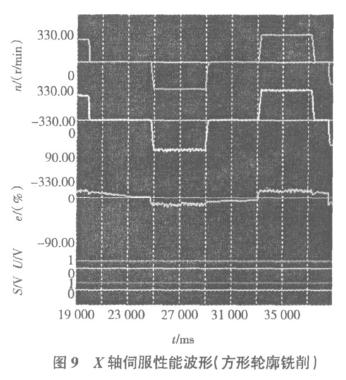
由于采用单片机与DSP配合,系统的运算和实时处理的能力大大增强,可以适应多坐标轴、高速度、高精确度的数控系统,实现单处理器系统难以实现的功能. 与由单处理器完成所有任务的情况相比,该方法允许较短的插补周期,实现更高的进给和伺服控制精确度. 并经实验证明该伺服运动控制器反向速度快、定位时间短、转矩恒定,具有良好的线性调速特性及动态性能.
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)