基于DSP的有源降噪系统的设计与研究
在科技迅猛发展的今天,人们在享受现代科技给人类带来的种种便利之时,也面临着日益严重的污染问题,在这些污染中,噪声是直接危害人们身心健康的污染源之一。在工业生产、公共交通、宇航、通讯等人类生活的各方面均存在噪声污染,在某些场合则十分恶劣。调研发现履带车辆舱室内各频率噪声大约为100 dB~120 dB,对乘员的听力、健康、通话、操作极为不利。因此,降低车辆舱室内的噪声,将会明显改善操作人员的健康状况和提高战斗力。本文针对坦克舱室内的噪声进行了有源降噪系统的研究。
1 有源降噪的原理
任何一个声学系统包括声源、传播途径和受者3个环节,控制噪声应从这三方面进行。传统的无源噪声控制在中高频取得了较好的降噪效果,但对于低频噪声,因无源材料的声衰减特性随频率的降低而变差,要取得良好的降噪效果,就要增加材料的体积和重量,会使工程实施趋于庞大化,甚至难于实现。随着高速数字信号处理技术的发展,体积小、便于设计和控制的有源噪声控制方法,能在低频段实现较好的降噪效果[1]。
有源噪声控制是根据2个声波相消性干涉或声波辐射抑制的原理,通过人为地制造1个控制声源(次级声源),使其发出的声音与原来的噪声源(初级声源)辐射噪声大小相等、相位相反,使两者作用结果互相抵消,从而达到降噪的目的[2]。依据此降噪原理,提出了由1个初级声源和1个次级声源所组成单极子两源系统的降噪模型。其示意图如图1所示。
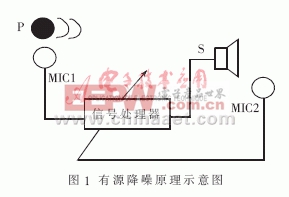
图中,P为初级声源,MIC1为噪声传感器,用于采集对象P的信息。S为输出控制的扬声器及次级声源,MIC2为误差传感器,采集误差信息。设P产生的源声场为: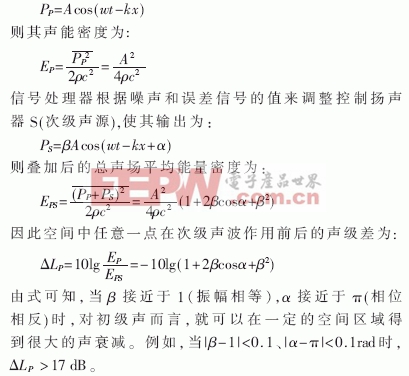
2 有源降噪系统的硬件设计
为实现此系统,其硬件设计框图如图2所示。
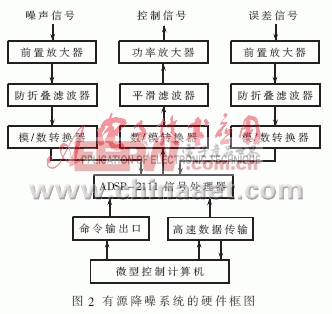
图1中的传声器MIC1、MIC2拾取的噪声信号和误差信号,经过三极管放大后,进行防折叠滤波处理以及模-数转换,将数字信号直接送入DSP和主机中,对实验数据进行分析,将得到的控制信号进行数-模转换,经平滑滤波、放大后驱动图1中的扬声器S,使控制信号和噪声信号相叠加,完成有源降噪的过程。
2.1 ADSP-2111信号处理器
系统中数字信号处理器[3]选用AD公司的16位定点的ADSP-2111芯片,其核心结构如图3所示,特点如下:

(1)ADSP-2111芯片采用哈佛结构,片内有6条总线(1条程序总线、2条数据总线、2条地址总线和1条DMA总线),这种分离的程序总线和数据总线,可允许同时获取指令字(来自程序存储器)和操作数(来自数据存储器),而互不干扰。这样可以在1个周期内同时准备好指令和数据,对于数字信号处理中的许多运算,要比一般的单片机速度快得多,这对于实时性要求非常高的噪声控制来说,是非常必要的。
(2)ADSP-2111采用流水线操作,以减少指令的执行时间。执行一条指令要通过取指令、译码、取操作数和执行几个阶段,流水线操作使4条不同的指令处于激活状态,这极大地提高了运算速度,体现了DSP的优越性能。同时,其内部含有硬件乘法/累加器,从硬件上实现了乘法器和累加器的并行工作,可在单指令周期内完成1次乘法并将运行乘积求和的运算。
(3)ADSP-2111是带有主机接口HIP(Host Interface Port)的芯片,能较方便地与PC机接口。HIP为并行I/O口,允许ADSP-2111做主机存储器映像的外设,其操作速度与ADSP-2111的总线速度相似,主机对DSP程序的加载及与DSP之间的数据通信均通过HIP接口来完成。
2.2 ADSP-2111芯片的外围电路[4]
(1)滤波器的设计
由于存在声反馈,检测传声器采用电容式的单指向性传声器MIC1和MIC2来拾取噪声信号和误差信号,信号经过三极管放大后,进行滤波处理。在A/D 变换前,需要设置1个模拟滤波器(即图2中的防折叠滤波器)进行预滤波以限制信号带宽,去掉高于1/2抽样频率以上的高频分量,防止频谱混叠现象的发生。本系统中的噪声为低频噪声,所以防折叠滤波器为低通滤波器;在D/A变换后,常接1个模拟低通滤波器(即图2中的平滑滤波器)来抑制高频分量,使阶梯状波形变成平滑的模拟信号输出。本系统中的防折叠滤波器和平滑滤波器均选用开关电容滤波器ICMF-10,内藏2个二阶滤波器,通过外部提供的时钟脉冲及外接电阻,即可实现高通、低通、带通、带阻和全通等滤波器的功能,通用性较强,本系统应用其低通特性。
(2)数-模转换的设计
采用AD1848音频接口芯片。它具有双路高性能的ADC和DAC,均由ADSP-2111直接控制,采样频率分布于5.5 kHz~48 kHz之间,可以满足有源降噪系统的要求。功率放大器采用低频功率放大器TA7240AP,产生的控制信号驱动扬声器,完成有源降噪的过程。
3 有源降噪系统的实验研究
3.1 LMS 算法简介
在有源降噪系统中,要求控制系统具有快速跟踪能力,即控制速度应能跟上噪声的变化,且有满足应用要求的降噪量,所以控制算法要求具有自适应的特点,要求其收敛速度快、稳定性好;同时计算量小,便于实现。本系统采用LMS(Least Mean Square)自适应算法,以满足系统要求。LMS算法的迭代公式为:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)