智能汽车竞赛技术报告(节选)
摘要:针对智能车竞赛中传感器信号处理设计安装、底盘参数选择、电路设计、HCS12控制软件主要理论、控制算法等方面进行阐述,并列出了模型车的主要技术参数。
第五届“飞思卡尔”杯全国大学生智能汽车邀请赛在原有CCD组和光电组基础上增加了电磁组,以100mA的交变电流为赛道,自主开发检测传感器,检测赛道信息。鉴于电磁组与光电、CCD在检测方法上有本质的不同,我们在传感器设计上采用电感线圈检测磁场,通过在多个点布置不同方向的检测传感器获取赛道信息,利用所获取的信号进行处理,实现对赛车转向、速度进行控制。同时,我们利用前几届比赛积累下的经验,继续加强在电源管理、噪声抑制、驱动优化、整车布局等方面的研究工作,使智能车能够满足高速运行下的动力性和稳定性需求,获得了良好的综合性能和赛场表现。

整车设计思路
控制系统
智能车的工作模式如图1所示:电磁传感器获取赛道某点电磁特性,信号输入到S12控制核心,进行进一步处理以获得赛道信息;通过光电编码器转速传感器检测车速,并采用S12 的输入捕捉功能进行脉冲计数计算车速和路程;通过片上AD检测电池电压;舵机转向采用分段PID控制;电机转速控制采用PID控制,通过PWM控制驱动电路调整电机的功率。
整车布局
鉴于赛车和赛道的特点,并且车模不变,今年在整车布局上仍延续基本布局的思路,采用低重心紧凑型设计,并架高舵机以提高响应速度。为调整整车重心位置,采用碳杆支撑电磁传感器,减小转动惯量。 在降低整车重心方面采用了低位主板的布局,同时设计了强度高质量轻的电磁传感器安装架,减轻信号采集电路板重量,降低电池架高度,降低赛车前方底盘高度,如图2。
电磁组主要特点
1. 传感器信号为模拟值
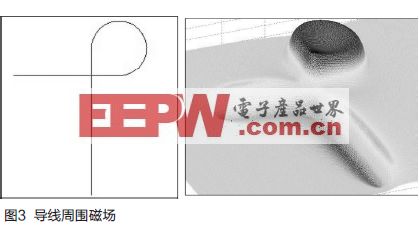
电磁组需要检测的信号为大小100mA,频率为20KHz的方波信号,赛道由导线铺成,导线周围分布着交变的电磁场,由于赛道的各种形状,使得磁场发生叠加,不同的赛道形状形成不同的特征磁场,如下图为十字线附近的磁场。赛道信息相对于传统黑白线具有信号可以提供模拟信息的优势,我们利用电磁赛道这种优势,完善小车控制算法,达到了较好的控制效果。
2. 传感器信号具有方向性
磁场是矢量,在空间的分布为具有方向性,所以传感器检测到的信号也具有特定的方向性。在实际检测的时候发现,不同方向传感器的变化规律有很大的不同,这也和磁场的分量变化规律相一致。比如,磁场垂直分量变化的比较早,但是受相邻赛道的影响较大,而磁场的水平分量恰好相反。
硬件设计
传感器方案
磁场检测传感器
使用10mH电感和6.8nF电容并联谐振,来感应20kHz的磁场信号,经放大电路放大后,得到正弦波,再用AD采样,得到正弦波的峰值,以判断传感器离导线的距离,从而定位导线。由于官方给出的三极管放大电路不易调节放大倍数,检波电路信号变化速度较慢,我们决定使用运放放大直接由AD采样。电路图如图4。运放使用了TL082双运放,能够将信号放大几千倍,可以满足探测的需要。电磁起跑为并排放置的3000gauss的磁铁,经过对霍尔传感器和干簧管的试验,最终选择使用干簧管做起跑检测,以达到较高的检测精度和较大的检测距离。
传感器的布局
电磁传感器测出的信号为当前所在位置的某个方向的磁场信息,所以传感器的布局至关重要。通过实验发现,当传感器相距较大,视角宽,得到的赛道信息量大。所以,采用尽量架宽主要传感器的方式,以获得丰富的赛道信息,并且提前预知赛道形状。

主板电路设计
主板上主要包括电源模块、电机驱动、信号检测电路、各模块的接口。
信号检测电路
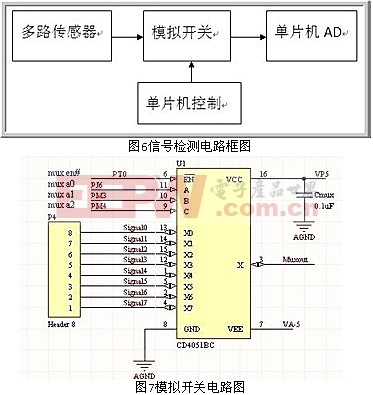
多个传感器的信号接到主板上后,通过模拟开关CD4051芯片选通,然后输出给单片机AD进行采样,框图如图6。模拟开关使用性能优良的CD4051芯片,8路信号输入,电路图如图7。
赛道识别
传感器的布局方案为车的赛道识别提供了一定的前瞻,软件的设计方案就要利用好这样的前瞻,更早地识别赛道变化情况,提高行进速度。同时,除了前瞻以外,还需要考虑车前方近处的赛道情况。综合考虑二者的情况,给出的赛道识别信息,可以同时满足远处和近处的要求,实现在“S”形弯道尽可能直冲、弯道切内线并且提前转向的效果。
此外,还需要对于一些特殊情况进行特殊的处理。首先,是十字线的处理。从图3中可以看到,在前瞻较大的时候,十字线的磁场分布与正常的九十度弯道非常类似,容易出现忽略十字线直接转向的情况。进入十字线之后,内侧的磁场与螺线管类似,远大于外侧的磁场,容易出现内切过大的情况。为此,我们在十字线附近
- 飞思卡尔采用最新平板设计改进第二代智能本外观(01-06)
- DSP系列为下一代无线基站部署提供更高的性能支持(01-07)
- SoC:IP是新的抽象(10-24)
- 如何采用门控时钟来设计低功耗时序电路(06-23)
- 支持ASIL D 应用的安全集成硬件解决方案(12-20)
- 基于飞思卡尔DZ60的AD 1302 KEY 485 CAN FLASH LCD程序(12-01)