基于的毫米波天线自动对准平台系统设计
摘要:在毫米波中继通信设备中,为提高对准精度,缩短对准时间,满足快速反应的要求,并结合毫米波波辩窄,方向性强的特点,创造性地提出了毫米波天线自动对准平台系统的设计方案。在天线对准过程中,将复杂的的空间搜索转换成两个简单的水平和垂直搜索,简化了搜索控制算法。采用基于ARM的32位微处理器LPC2294进行控制,用步进电机驱动平台和毫米波设备转动,实现毫米波通信设备的快速准确对准。毫米波中继通信设备在国内还处于研发改进阶段,所以该对准平台系统具有极大的参考意义。
关键词:毫米波天线;ARM;μC/OS-Ⅱ;嵌入式RISC处理器;自动对准平台
毫米波作为一项尖端学科在中继通信方面发挥着越来越重要的作用。但毫米波波瓣窄,方向性强,导致天线对准困难,存在对通时间长,甚至难以对准的问题,不能满足快速反应的要求。因此,需要一种高效的毫米波天线自动对准装置来提高天线架装与对准速度,缩短天线架装与对准时间,以适应快速准确通信的需要。本文从多任务处理和可靠性等角度出发,提出了一种基于ARM7的32位微处理器LPC2294和实时多任务操作系统μC/OS-Ⅱ步进电机控制平台的方法,将毫米波通信设备架装在平台系统上,从而使毫米波通信设备通过平台的转动快速对准。
1 系统工作原理
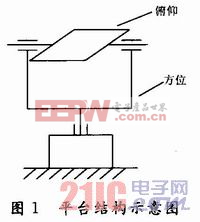
在随机状态下,通信设备中两个天线的轴线一般位于不同的平面内,故天线对准实际上是一个较复杂的空间搜索问题。从天线轴线在两正交平面(方位平面和俯仰平面)内的投影可以看出,只要分别在方位面和俯仰面内调整即可将两天线对准。这种调整方式将空间搜索转换成两个简单的水平和垂直面搜索,可以简化搜索控制算法。天线对准时,两天线的方位指向误差较大,而俯仰指向误差不会太大。故可先实现方位对准,然后调整俯仰指向,实现两个天线的完全对准。基于上述特点,将天线安装在内框的俯仰平面上,如图1所示。实际使用时,通信设备通过平台架装在天线升降器上,最高可以距地面10 m,并可以根据需要升降。采用单轴步进式跟踪方案,俯仰方向和水平方向的转动共用一个电机,通过继电器进行切换。根据平台的转动规律,在ARM控制器中,编程实现间歇式发送脉冲,由电机驱动器放大脉冲,从而驱动步进电机,最后由机械装置转动平台以及与其相连的通信设备,完成对毫米波通信设备间方向的搜索与对准。
2 系统硬件构成
该平台对准系统主要由平台控制板、电机驱动器、步进电机、机械传动装置和相关传感器(罗盘和GPS)等组成。图2给出了步进电动机的片外连接硬件结构框图。本文重点介绍其核心——ARM控制部分。

2.1 ARM处理器简介
ARM的32位体系结构被公认为业界领先的32位嵌入式RISC处理器结构。LPC2294是飞利浦公司生产的32位ARM7TDMI-S微处理器,具有低功耗、低价格、高性能的特点。
2.2 系统硬件结构设计
平台控制板的ARM处理器采用LPC2294,其驱动电路由SGS公司推出的L297和L298集成芯片组合而成,驱动电路原理图如图3所示。平台控制板还通过串口与磁罗盘和GPS相连,用于采集所需的数据信息。

显示控制单元仍然采用ARM芯片LPC2294,它同时与键盘和液晶显示器相连,见图2。键盘用来输入己方和对方的坐标以及对平台系统控制命令的输入,液晶显示屏可显示站点坐标、电平信号强度和平台工作状态等,从而构造一个友好的人机交互界面。显示控制单元通过50 m的电缆与平台系统相连,通过CAN接口与平台控制板通信,当用户完成设置时通过CAN接口将设置信息发送到平台控制器,同时显示控制单元还作为整套毫米波设备的基带控制单元的处理中心。
3 软件设计
由于系统功能复杂,为了增加程序功能,减少死机或者程序跑飞等情况,故考虑将μC/OS-Ⅱ嵌入式实时多任务操作系统作为应用软件平台,把各个系统功能划分为不同的任务。由操作系统来完成任务的调度以及任务之间的同步和通信,用中断来处理实时性要求强的异步事件。
3.1 μC/OS-Ⅱ的移植
μC/OS-是一种可移植、可固化、可裁剪及可剥夺的实时多任务内核(RTOS),其绝大部分源码是用ANSI的C语言编写,可以方便地移植并支持多种类型的处理器。μC/OS-Ⅱ的硬实时性以及低成本、易控制、小规模、高性能的特性,使其能满足工业中小型控制对可靠性、实时性以及多任务处理的要求。
编写应用软件首先要移植μC/OS-Ⅱ,移植对处理器有一定的要求。本设计采用的LPC2294处理器以及开发工具ADS 1.2完全满足移植要求,可以进行移植。关于μC/OS-Ⅱ移植的参考资料比较多,本文不再做详细讨论。
3.2 任务的划分与优先级的确定
μC/OS-Ⅱ属于抢占式实时操作系统,总是会使处于就绪状态中优先级最高的任务运行。它不支持时间片轮转调度,所以必须将系统功能合理分解为不同优先级的任务。任务的优先级由任务的重要性和实时性要求程度决定。划分系统任务的时候,还要考虑到低优先级的任务能有机会得到运行,否则系统将难以正常工作。因此建立六个任务进行调度,任务之间的通信方式及流程如图4所示,分别如下:
TaskMotorCtl:任务0,作为程序的主任务,实现初始化和电机控制功能;
TaskCal:任务1,在电机转动过程中实时计算转动角度等相关参数;
TaskPortScan:任务2,端口扫描任务,实现限位开关端口电平的监控功能;
TaskUARTORecv:任务3,串口0磁罗盘数据的接收处理任务;
TaskUART1Recv:任务4,串口1GPS数据的接收处理任务;
TaskCAN:任务5,CAN接口数据收发处理。
- 基于FPGA的异构可重配置DSP平台(01-14)
- 基于DSP的宽带雷达多片流水分段脉压处理平台设计(08-02)
- 基于MCU+DSP的运动控制硬件平台设计(10-01)
- 嵌入式系统硬件平台的软件PLC实现方法(04-12)
- 革新2410D开发板试用手记(04-21)
- 基于DSP的通用型嵌入式语音平台的硬件设计(03-27)