基于DSP 的无位置传感器的直流无刷电机控制系统
传统上把具有梯形波反电势的永磁同步电机称为直流无刷电机。直流无刷电机的转矩控制需要转子位置信息来实现有效的定子电流控制。而且,对于转速控制,也需要速度信号,使用位置传感器是直流无刷电机矢量控制的基础,但是,位置传感器的存在也给直流无刷电机的应用带来很多的缺陷与不便 :首先,位置传感器会增加电机的体积和成本;其次,
连线众多的位置传感器会降低电机运行的可靠性,即便是现在应用最多的霍尔传感器,也存在一定程度的磁不敏感区;再次,在某些恶劣的工作环境、例如在密封的空调压缩机中,由于制冷剂的强腐蚀性 ,常规的位置传感器根本无法使用;最后,传感器的安装精度还会影响电机的运行性能,增加了生产的工艺难度。
为了降低硬件的成本和复杂性、增加机械鲁棒性和驱动系统的可靠性和减少维护的需要,又不增加系统惯量并能减小噪音的要求,最理想的就是取消矢量控制系统中的位置传感器。
所谓无位置传感器的直流无刷电机控制技术 ,正确的理解应该是无机械的位置传感器控制技术。在电机运转的过程中,作为控制逆变器换相导通时序的转子位置信号仍然是需要的,只不过这种信号不再由机械式的位置传感器来提供,而由新的位置检测信号电路来代替、即以提高电路和控制的复杂性来降低电机的复杂性。所以,直流无刷电机无位置传感器控制技术的核心和关键就是构建一个转子位置信号检测电路,从软、硬件两个方面来间接获得正触发相应的逆变器,从而驱动电 确的转子位置信号,机运转。要做到精确控制需要相当复杂且快速的运算,一般的微处理是器难以实现的,但是,数字信号处理器以其强大的运算功能使这种控制方式成为现实。
1 基于反电势的转子位置检测方案[2]
直流无刷电机的反电势幅值是与位置相关的。这样,如果它可以精确地检测到,就可以得到实时的精确转子位置,从而用来控制逆变器的开关方式。这种方法的缺点是:电机静止或低速时的反电势信号为零或很小,难以得到有效的换向信号,因此系统的低速性能差,电机启动需要特别的硬件电路或专门的软件启动方法。
当电机速度大于零时,每个电周期内某相反电势为零的位置只有两个,可以从图1 所示通过过零点时反电势的斜率来区分这些位置,每一段对应电周期内的60°区间。换向发生在每一段的边界处,反电势过零点和需要换向的位置之间有30°的偏移,需要对其进行补偿。
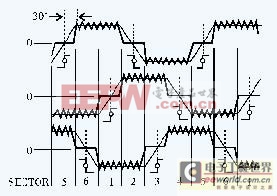
图1反电势过零点
在任一时刻只有两相通电,且流经这两相的电流相反,图2 所示为W 相用于反电势检测时的情况。当U 相内流经正向电流(定义为流向星型连接中心点的电流),V 相内流经负相电流时,对应图1 中区间6Q和1Q时,此置位的1动作。假设通电相的两端总是对称地分别连接到DC 电源地两个端点上,则星型连接中心点的电压总是1/2VDC,与加在这两个通电相绕组上的电压极性无关。但是,只有在每相的R、L 和反电势
都相同,且每相的开关管压降都相等的情况下,星型连接中心点的电压值才为1/2V DCC。假设现在的情况就是这样,反电势过零点将被偏置1/2V DC。

上述方法很容易通过硬件实现,即通过分压电路对三相的端电压和VDC 分别进行采样,并将采样值送入比较器的比较端口,得到的过零点时刻即为1/2VDC 的时刻。使用一个可用的定某相反电势经过时器测量60°(即两次反电势过零点之间)的时间。将这个值除以2,然后加载到另一个定时器中,这样就可以补偿正确换向所需的30°偏移量。
2 DSP 控制方案的系统实现[3] [4]
2.1 TMS320LF240x 芯片简介
TMS320LF240x 系列DSP 是TI 公司为满足大范围的数字电动机控制(DMC)应用而设计的。该芯片具有高性能的16 位定点DSP 内核,采用改进的哈佛总线结构,具有专门的硬件乘法器,采用流水线操作,具有30MIPS 的处理能力,大多数指令在单周期内即可执行完成。同时,该芯片集成了丰富的片内外设,包括事件管理器、模数转换器(ADC )、串行通信接口(SCI)和串行外部设备接口(SPI)、系统保护(如低电压检测和看门狗定时器)等。TMS320LF240x 可以实现用软件取代模拟器件,完成复杂的控制算法,方便地修改控制策略,修正控制参数,能满足无传感器直流无刷电机控制系统对实时控制的要求。
2.2 DSP 控制系统的硬件实现
图3 是根据前述控制原理设计的基于DSP 的直流无刷电机控制系统。该系统主要由直流无刷电机、功率变换器电路、电机转子位置检测电路、各种保护电路以及以TMS320LF240x 为核心的数字控制器等构成,其中功率变换器电路由整流滤波电路、逆变器电路(IPM 功率模块)和相应的保护电
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)