基于DSP的电动助力转向系统的设计

3.1 电机助力控制算法
控制系统根据驾驶员加在方向盘上的力矩和当时的车速,按照预制助力特性确定电机目标助力电流的大小和方向。助力变化区域中,方向盘输入力矩与助力矩按线性规律变化。其函数表达为: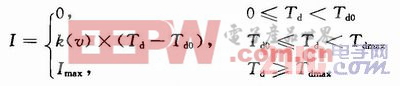
式中:I为电动机目标电流;Imax为电动机最大工作电流;Td为方向盘输入转矩;k(v)为助力特性曲线的梯度,随车速增加而减小;Td0为系统开始助力时的方向盘输入力矩;Tdmax为系统提供最大助力时的方向盘输入力矩。
本系统采用直线型助力特性曲线,横坐标为方向盘输入扭矩(单位:N·m),纵坐标为助力电流Im,其中,Td0=±1 N·m,Tdmax=±7 N·m,Vmax=80 km/h,方向盘转矩工作在-10~+10 N·m之间,进入-7~+7 N·m后电动机电流达到饱和,电动机的最大工作电流小于20 A。随着车速的增加,电机电流减小,助力斜率减小,手感由轻转重,方向盘顺时针转向和逆时针转向时曲线对称。
3. 2 电机电流控制算法
本系统使用的是数字PID控制器,其算法有位置式控制算法和增量式控制算法两种。位置式PID控制算法为全量输出,其产生的控制电动机的电流易产生方向盘振动,因此采用增量式PID控制算法来进行电动机电流的控制。
增量式PID控制算法表达式为:
式中:Un为控制量,也是电机驱动电路的输入量;en为电机目标电流和实际电流之间的差值;kP为比例系数,kI为积分系数,kD为微分系数。
3.3 仿真结果分析
由于EPS的助力转矩跟电动机的电流成正比,因此分析系统助力转矩的变化就能得出系统助力电流的变化规律,从而研究EPS中电动机助力电流控制的算法。
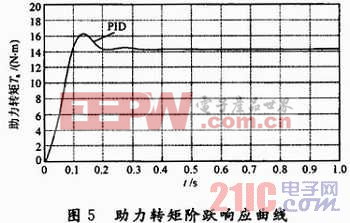
图5是系统在Matlab中PID控制下电动机输出的助力转矩对方向盘输入转矩的阶跃响应曲线,从中可以很明显地看出,采用PID控制系统达到稳态值需要的时间短、超调量小,振荡次数少,说明PID控制系统的稳定性和响应品质都比较好。因此,采用PID控制算法能较好地按照控制策略的要求提供转向助力。
4 EPS系统软件设计
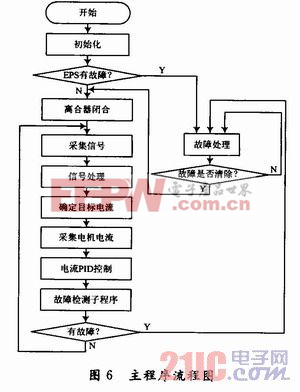
根据上述控制方法,设计了相应控制软件。DSP上电后要进行特殊功能寄存器的初始化,包括定时器工作方式、A/D采样方式设置等。初始化设置结束后,开始检查EPS系统中的电机、离合器、扭矩传感器等工作是否正常,如有故障则点亮警示灯进行报警,若一切正常则EPS系统开始正常的电动助力控制,主程序流程如图6所示。整个程序还包括一些子程序、如系统初始化子程序、定时器中断子程序、故障信号检测子程序、信号采集滤波子程序等。
TMS320LF2407A是一种新型16 bDSP,利用它作为控制核心,简化了电动助力转向系统的硬件电路的设计,有利于控制系统小型化。同时采用PID控制对电动机输出电流进行闭环控制,系统助力跟随性能好,响应速度快,控制精度高。
- 采用PIC16F877单片机的汽车电动助力转向系统控制(01-02)
- 角位置检测系统及其在电动助力转向系统中的设计与应用(01-04)
- 采用PIC单片机的汽车电动助力转向系统(12-03)
- 主动前轮转向控制技术的现状与发展趋势(05-18)
- 基于FPGA的DSP设计方法(08-26)
- 电力电子装置控制系统的DSP设计方案(04-08)