采用PIC单片机的汽车电动助力转向系统
1 引言
随着电子控制技术的发展及其在汽车领域的广泛应用, 电动助力转向系统(Electric Power Steering, 简称EPS)越来越成为目前汽车电子技术研究的热点之一。与传统的转向系统相比,EPS系统结构简单,灵活性大,可以获得理想的操纵稳定性,能动态地适应汽车行驶状况的变化,在操纵舒适性、安全性、环保、节能、易于维修等方面也充分显示了其优越性[1]。目前, 电动助力转向已部分取代液压助力转向并获得广泛应用,如日本的大发、三菱、本田汽车公司,美国的Delphi汽车系统公司,德国的ZF公司等都相继研制出各自的EPS并装配使用。国内对EPS 系统的研究起步较晚,仅有清华、华中科大、吉林大学、合肥工大等高校开展了系统结构的方案设计、系统建模和动力学分析等研究,但处在理论探索、实验研究阶段。国内部分汽车厂商如重庆长安、南昌昌河、东风、一汽等与高校联合研究,也都处在研制的初级阶段,未达到实用程度[2]。
2 EPS系统的硬件组成及工作原理
2.1 EPS的硬件组成
EPS是一种直接依靠电力提供辅助扭矩的动力转向系统,结构如图2-1所示,它由电子控制单元(ECU)控制电机提供助力,系统主要由电子控制单元、扭矩传感器、转角传感器、车速传感器(可与其他系统共用)、直流电机、离合器、电磁继电器、减速机构和转向机构等组成。
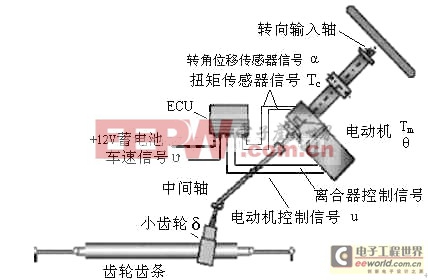
图2-1 EPS系统结构图
2.2 EPS的工作原理
当汽车点火开关闭合时,ECU上电开始对EPS系统进行自检,自检通过后,闭合继电器和离合器,EPS系统便开始工作,当方向盘转动时,位于转向轴上的转角传感器和扭矩传感器把测得方向盘上的角位移和作用于其上的力矩传递给ECU,ECU根据这两个信号并结合车速等信息,控制电机产生相应的助力,实现在全速范围内最佳控制:在低速行驶时,减轻转向力,保证汽车转向灵活、轻便,在高速行驶时,适当增加阻尼控制,保证转向盘操作稳重、可靠。
3 基于PIC单片机的ECU系统设计
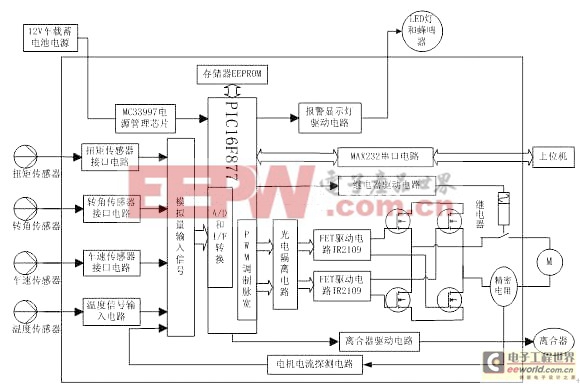
图3-1 ECU系统结构原理图
3.1 ECU工作原理
系统的控制核心为PIC16F877单片机,控制单元结构如图3-1所示。整个系统由车载12V蓄电池供电,ECU工作时,扭矩、转角、车速、温度等传感器把采集到的信号经过输入接口电路处理后送至单片机的相应端口, 单片机根据系统助力特性和相应算法对这些数据分析处理,以确定助力电流的大小和方向,并通过单片机的PWM口发出脉冲指令和相应的换向控制端口发出换向指令,通过驱动电路和H桥电路控制直流电动机工作。在电动机的驱动电路上设有电流传感器,该传感器把检测到的电机实际工作电流通过电流探测电路反馈到单片机,单片机再根据相应的控制算法对电机实现闭环控制。如EPS系统工作出现异常,单片机将驱动EPS灯亮进行报警提示,同时断开继电器、离合器,退出电动助力工作模式,转为人工手动助力模式[3]。
3.2 PIC16F877单片机简介
该款机型是美国Microchip公司生产的8位RISC结构的单片机,具有高速数据处理的特性(执行速度可达120ns),PIC16F877内部自带看门狗定时器、具有256Bytes的EEPROM、8k空间的FLASH存储器、8路10位AD转换功能、2个脉宽调制CCP模块、在线烧录调试(ISP)功能,宽电压工作,可靠性高。PIC16F877有8级深度的硬件堆栈,RAM区的每个Byte位都可以寻址,有4条专用的位操作指令和2条移位指令。
3.3 直流电动机的选择
无刷直流电机在控制特性、效率、转矩脉冲、制造成本等方面,具有明显的优势。本项目采用永磁式无刷直流电机做为驱动源。
3.4 扭矩、转角传感器的选择
本文采用意大利BI公司的扭矩、位置复合传感器,该传感器除了提供扭矩信号外,还提供方向盘位置信号,为回正和阻尼逻辑的开发提供了便利。
3.5 电动机驱动控制电路的设计
电动机驱动控制电路必须能够高精度、快速地调整电动机的转速和输出转矩,从而满足EPS系统实时性和可靠性的要求。本项目中后向通道的核心控制采用脉宽调制(PWM)控制H桥电路。直流电机PWM控制方式有多种,根据电机工作的实际需要和系统的整体要求,本项目采用受限单极可逆PWM控制模式,主要优点在于可以避免开关管同臂导通,运行可靠性高、不需附加延时电路、开关频率相对较高,特别适用于大功率、大转动惯量、可靠性要求较高的直流电机控制的场合。
3.5.1 电机驱动电路
电动机的驱动电路主要包括FET桥式电路、FET基极驱动电路、电机驱动线路上的电流传感器和继电器构成。
FET桥式电路主要由四个大功率MOSFET功率管组成,要求功率管具有良好的开关特性、能承受较大的驱动电流、且具有较长的使用寿命,根据电机的功率参数及功率管的极限参数和电特性,我们
PIC16F877 PIC单片机 电动助力转向系统 相关文章:
- pic16f877a的电平变化中断(interrupt on change)使用误区(12-03)
- 用单片机pic16f877a实现鼠标数据的采集(12-03)
- PIC16F877A一路舵机参数化控制程序(12-02)
- PIC16F877A与PC机串行通信C语言源程序(12-02)
- PIC16F877A和AVR的单片机的PWM输出程序(12-02)
- 基于PIC16F877单片机数码管显示矩阵键值(11-30)