基于Matlab/Simulink的滑模软起动器仿真研究
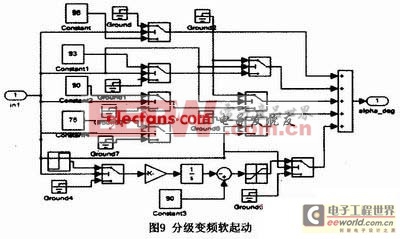
定的电流限制,然后在保持输出电流小于电流设定值的条件下逐渐升高电压,直到额定电压,从而使电动机转速逐渐升高,直到额定转速。图7是基于Matlab/Simulink搭建的限流软启动alpha计算子模块,alpha计算是在电流的闭环控制使用模糊控制器计算alpha角,调节电机两端电压。 限流软起动采用电流反馈的闭环模糊控制调节,可以快速、准确地触发晶闸管,避免大电流的冲击,很好地限制起动电流。 转矩控制起动是控制电动机的起动转矩由小到大线性上升,并根据起动转矩变化计算晶闸管的导通角进而控制电机的输入电压,使电机的转矩满足电动机使用要求。图8是转矩控制软起动alpha角计算子模块。 转矩控制软起动的优点是起动平滑、柔性好,对拖动系统有利,同时减少对电网的冲击,是最优的负载起动方式。 2.4 分级变频软起动 分级变频(离散频率法)就是使传统软起动器输出电压的频率从一个较低的值开始,分级上升,最后达到50Hz。分级变频虽然可以实现变频,但不能使频率连续地变化,只能使频率分级变化,而且各级频率都是50Hz的n分之一(即50Hz的分频),实现较高起动转矩。图9是分级变频软起动导通角alpha的计算子模块。在低频起动过程中,为保持电机的主磁通不变,要相应地降低定子电压,通过计算得到电机在F/2、F/4、F/5、F/7的导通角alpha的大小,在频率达到50Hz后,导通角缓慢减小到0,使电动机上的电压达到额定电压,完成软起动。 分级变频起动能有效提高电动机起动转矩,可使电动机在重负载的情况下平滑起动。 3 仿真结果分析 在matlab/simulink仿真环境中,通过对图1中软起动方式的选择,对斜坡控制、限流控制、转矩控制和分级变频控制进行仿真。分别得到四种软起动的定子有效电流、转速和转矩的波形图。 电机参数为10kW、220V、50Hz,极对数为2,定、转子端的标么值参数分别为:Rs=0.0401Ω;Rr=0.0377Ω;Ls=Lr=1.0349Ω。 通过对仿真结果的分析可以到处结论:斜坡起动是一种开环的起动控制方式,能够降低电机的起动电流,起动转矩不高,操作简单;限流软起动是采用电流的闭环控制,能够很好地限制电机的起动电流,但是起动时间较长,起动转矩不高;转矩控制软起动转矩能够平滑地上升,降低转矩突变给拖动系统造成的影响,是很好的负载起动;分级变频起动能够限制电动机的起动电流,起动转矩大,是一种有效的高转矩起动方法,适用于大负载的电机起动。 4 结论 滑模软起动器是综合了多种软起动方式的软起动装置,通过滑模控制对软起动方式进行选择,实现多种软起动,扩大了软起动装置的应用范围,提高了软起动装置的实用性,具有很大实用价值。 

FPGA IP 嵌入式 PLD CPLD SoC 数字信号处理 消费电子 相关文章:
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 基于FPGA的快速并行FFT及其在空间太阳望远镜图像锁定系统中的应用(06-21)
- 3DES算法的FPGA高速实现(06-21)
- 用FPGA实现FFT算法(06-21)
- FPGA的DSP性能揭秘(06-16)