基于DSP+CPLD的异步电动机控制系统开发平台设计
码,通过地址总线输入CPID,选通外围电路达到对其进行控制,并且可以实现SRAM以及LED、IED读写信号的控制。
TMS320F2812是TI公司最新推出的是32位定点DSP控制器,采用改进哈佛结构,具有高速数据处理能力。其片内集成有丰富的运动控制专用外设:PWM产生电路、SVPWM状态机、可编程死区、比较/捕获单元等。其他功能外设:A/D转换单元、SCI、SPI、CAN控制器等,适合用在高精度伺服控制领域。
Altera公司的MAX IIZ系列EPM57OZM144C7N采用MBGA封装,有144个引脚和116个用户可用I/O口,典型等价宏单元440个,DSP电压与该芯片匹配,同时提供了JTAG接口,可以进行ISP编程,逻辑处理能力强大,外围逻辑电路得以简化。
(1)电源模块。
TMS320F2812采用双电源供电,系统先给所有+3.3 V的I/O加电,再接通1.9 V的内核电源。针对这样的电源要求,选用TI公司提供的双电源供电芯片TPS767D301给DSP供电,该芯片为双路输出,一路输出恒定的3.3 V电压,另一路输出可调电压,实现DSP供电时序要求。采用TPS3823S芯片实现电源监控和手动/自动复位,监控程序运行,防止程序陷入死循环。TPS767D301电平输出电路如图2所示。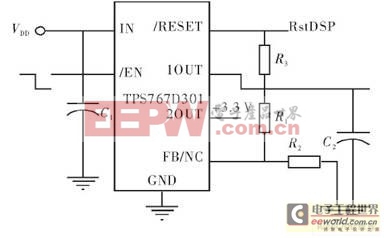
图2 TPS767D301电平输出电路
1OUT=(1+R1/R2),2OUT=3.3 V。式中,VREF=1.183 4 V。选取适当R1和R2的电阻值,就可得到可调电压。
(2)存储器模块。
在系统开发平台上完成各种控制策略以及各种算法的数据处理中,会产生很多临时数据,如果仅由DSP片内RAM承担,会加重DSP的负担,使得系统控制精度降低,限制系统的完整运行。为满足数据存储需要,扩展一片型号为IS61LV516的SARAM,通过CPLD地址译码产生的片选信号,可以指定其作为程序存储器或数据存储器。
(3)CPLD模块。
CPLD在该开发平台中起逻辑控制作用。可以进行:1)QEP信号处理,输入为速度位置传感器提供的速度位置信号、DSP给出PWM脉宽调制信号,输出为各IGBT驱动模块的控制信号,经光耦隔离电路进入IPM。正交编码器检测到的电动机位置转速信号送至DSP,经过其内部QEP电路得到电动机的速度和方向,实现系统的反馈控制和PWM控制信号输出,从而达到转速闭环控制。2)地址译码,对DSP输出的地址信号进行地址译码,实现对F2812外围扩展芯片片选功能,选通相应的外围芯片映射至F2812内存中。3)DSP的I/O扩展,如果系统同时控制多台电机,DSP自身I/O引脚就不能满足要求,需要通过CPLD扩展。CPLD对另外电机的正交编码信号进行处理,完成正交信号的倍频、脉冲计数,同时输出计数结果,作为电机速度、位置判断依据。
(4)显示模块。
为了保障系统的可靠运行,通过DSP与CPLD的配合,设计了与LCD液晶显示接口电路,控制LCD显示以及LED指示灯的显示,实现了系统的人机接口,使得系统具有良好的人机操作界面。液晶模块选用长沙太阳人电子有限公司的SMG12864ZK标准中文字符及图形点阵型液晶显示模块,可显示128×64点阵或8个×4行汉字,DSP与LCD之间的接口电路如图3所示。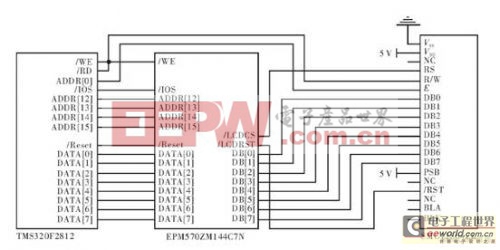
图3 DSP与LCD之间的接口电路
液晶的复位信号/RST和片选信号RS由DSP控制信号经过CPLD译码后产生,数据线。DB[0]~DB[7]由TMS320F2812的数据线DATA[0]~DATA[7]经过CPLD的双向总线驱动得到,其它同名信号对应相连。
(5)保护模块。
保护模块主要是在系统上电/掉电或出现故障的情况下,及时提供封锁信号,保证系统安全可靠地工作。该开发平台保护电路具有母线过压保护、过流保护、电机过热、IPM故障信号处理功能。系统的保护信号也可以融入到CPLD逻辑中,当故障发生时,可以实时快速切断CPLD的PWM输出。
同时,为了使该硬件系统应用范围得到扩展,设计了除异步电动机外不同电机以及不同控制策略可能用到的信号采集电路,以及不同位置反馈器件所用到的接口电路。
2 开发平台软件件总体设计方案
开发平台的软件开发和调试在TI公司DSP集成开发环境CCSC2000下进行。用C语言进行整个控制系统的软件编程。模块化的设计方法,使得编程和使用都方便灵活。利用本控制系统开发平台,通过软件编程,可以方便地实现异步电动机矢量控制,直接转矩控制等控制算法。
CPLD的开发工具为Max PlusII软件,VHDL语言编程,根据指定的引脚配置自动生成熔丝文件后,对CPLD器件下载编程。程序内各模块按严格时序工作,同时各模块又并行工作,完成不同的动作。
系统控制程序分为两部分,即主程序和中断服务子程序。主程序完成初始化后进入循环。中断服序程序主要完成系统各种控制策略,包括电机定子电流和电压采样,完成电流、电压的A/D转换。利用正交编码单元处理速度反馈信号。根据各种控制
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)