一种DSP通信接口的设计和实现
式、传输速率及各自工作方式等。本文设计中双方约定:波特率为9600bps。1帧信息格式为1个起始位、8个数据位和1个停止位。传送方式:PC机采用查询方式接收数据,TMS320F240采用中断方式接收数据。
4.TMS320LF2407的CAN通信设计
TMS320LF2407 内嵌的CAN模块,是一个16 位的外围器件,其通信特性有:(1)完全支持CAN2.0B协议;(2)具有6个邮箱,其中mailbox2与mailbox3可按工程需求配置为接收或发送邮箱,数据长度为0—8字节;(3)当发送出错或仲裁过程中数据丢失时,该控制器具有自动重发功能;(4)能够通过软件编程实现自检测功能。
4.1硬件设计
应用TMS320LF2407微控制器组成一个CAN总线网络,进行实时接收和发送数据。CAN控制器接口用于提供CAN协议控制器与物理总线之间的接口,总线接口芯片使用PHILIPS公司生产的PCA82C250,它可以方便的将CAN控制器连接到CAN总线网络上。硬件系统分为两层,第一层是CAN总线与TMS320LF2407的接口电路,实现CAN总线和TMS320LF2407的物理接口,第二层是TMS320LF2407与CAN总线的信息处理层。如图2所示。
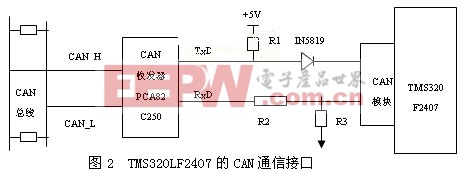
PCA82C250提供差分发送和对CAN控制器的差分接收,由于PCA82C250是5V电源供电,TMS320LF2407是用3.3V电源供电,因此采用电阻分压来实现电平转换。其中R2,R3分别取1KΩ和2KΩ,R1取10KΩ。对于二极管D1选用具有快速恢复能力的肖特基二极管IN5819。
4.2软件设计
4.2.1初始化CAN模块
CAN模块的初始化包括初始化位时间和初始化邮箱。
初始化位时间可按如下步骤进行(如图3所示):
(1)在MCR寄存器中设置改变配置请求位:CANMCR=1000H;
(2)配置BCR寄存器:CANBCR2=0000H; CANBCR1=0157H;
(3)请求正常模式:CANMCR=0000H;
初始化邮箱可以按照如下步骤配置邮箱(如图4所示):
(1)禁止邮箱写0到CANMDER:CANMDER=0000H;
(2)在CANMCR中设置改变数据域请求:CANMCR=0100H;
(3)改变邮箱内容:数据可以只在发送邮箱中设置;
(4)返回正常模式:CANMCR=0000H;
(5)使能邮箱:CANMDER=0004H;
4.2.2 发送消息
为了实现CAN模块的消息发送,需要按照以下步骤配置发送过程:
(1)对发送邮箱进行初始化
禁止邮箱对CANMDER写0:CANMDER=0000H;
在CANMCR中设置改变数据域请求:CANMCR=0100H;
对发送邮箱设置消息ID: CANMSGIDnH="0E00H";CANMSGIDnL=000FH;
设置消息控制域,即对CANMSGCTRLn进行写操作: CANMSGCTRLn="0008H";
创建消息并写到CANMBXnA、CANMBXnB、CANMBXnC和CANMBXnD中:
CANMBXnA=0ABCDH;CANMBXnB=0123H;CANMBXnC=0EF32H;CANMBXnD=6789H;
重新设置CANMCR的第8位,请求正常操作:CANMCR=0000H;
允许邮箱对CANMDER寄存器进行写操作:CANMDER=0004H;
(2)设置TCR寄存器的TRS位,请求发送消息:TCR=0010H;
(3)等待发送确认(TCR寄存器的TA=1);
(4)重新设置TA和发送标志:TCR=1000H;
4.2.3 接收消息
应用CAN模块接收外界消息时,需要对CAN控制器进行如下设置:
(1)设置局部接收屏蔽寄存器。 LAM1H=8000H;
(2)设置邮箱标识符和控制。
禁止邮箱对MDER写0:CANMDER=0000H;
写MCR寄存器申请改变数据域请求:CANMCR=0100H;
对发送邮箱设置消息ID: CANMSGIDnH="0E00H";CANMSGIDnL=000EH;
设置消息控制域:CANMSGCTRLn=0008H;
重置MCR第8位,请求正常操作:CANMCR=0000H;
允许邮箱写MDER寄存器:CANMDER=0044H;
(3)等待接收确认和CANIFR的邮箱中断标志。
(4)重置RMP和接收标志,必须对RMP写1: CANRCR="0040H";
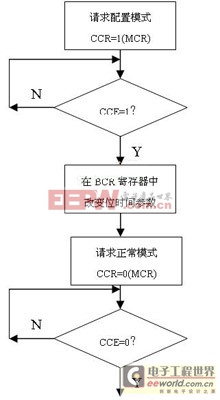
图3 初始化位时间编程流程图

5.结论
本文作者的创新点是:在工业控制领域中,往往是由一台主机控制多台从机,上位机和下位机的远距离通信通过串行通信实现。本设计综合实现了PC主机与DSP从机的RS-485远距离通信接口和DSP从机与CAN现场总线的数据传输接口设计,同时具备主从机的远距离通信和CAN现场总线设备的实时通信功能,具有广泛的应用前景。在设计中充分发挥了DSP的CAN模块和SCI模块的作用,使得接口设计简单,工作更加可靠。
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)