面向低成本变速应用的“即用型“交流感应电机控制IC
其中,Vnorm表示Vbus(t)的最佳值或参照值[ ]内的项是修正因子
由于略去了Vbus(t) 项,我们发现,总线电压中的任何干扰都不会影响输出电压。而且,由于th(t)/T比总是一个正的小数值,所以我们必须保证不管希望输出什么样的波形,都应该进行适当调整和偏移以反映这一点。举例来说,如果需要正弦调制,那么正弦波调幅就应该进行调整,使它不超过最大值1,而且波形应偏移1/2,以实现动态范围的完全利用。如果我们修改方程式2来反应这一点,计算输出的所有三种相位,我们会得出如下方程式:

其中,X是输出相位的编号(1,2,3) WO是输出波形的频率M是调制指数(0到1)
方程式3消除了输出波形的所有总线涟波。然而,这并不是最理想的状况,因为输出波形在1/2 Vnorm固定电压上有一定的误差,真正的固定电压应该是1/2 Vbus(t)。需要注意的是,调制模型由两项组成,分别是1/2 直流项和交流正弦项。在方程式3中,这两项都可以修正,事实上却只有交流项可以修正。如果我们从直流项对修改进行去耦操作,交流波形就可以在地面和Vbus(t)的动态范围内以自我为中心。重新书写方程式3来实现去耦,我们就可以得出方程式4。

这是MC3PHAC中使用的技术。Vbus(t)在每个PWM更新间隔(189或252μS)进行取样,并被分成表示3.5伏Vnorm值的数。由此产生的修改因子只被应用到调制指数(M)中,以修改Vbus(t)中因干扰引起的输出波形的任何失真。由于直流项不能应用修改因子,在偏压上就会出现一个人为产生的噪声(Noise Artifact)。然而,由于这个噪音对所有三个输出波形来说是共模信号,它将被电机拒绝,假定它的中间节点是浮动的。
图8显示了1/2hp电机的实际电流波形图,该电机由60 Hz上的单相115 V交流输入电压提供电源,且有大量的总线涟波。在第一个波形图中,MC3PHAC 总线涟波消除功能被关闭,波形中的失真反映了这一点。第二个波形图显示了同样的情况,但我们明显地看到它的总线涟波消除功能被激活并有效地消除了涟波。
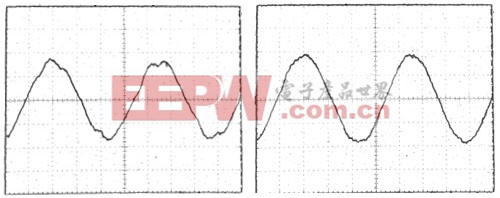
图8. MC3PHAC的总线涟波消除功能的影响
速度整平和更改
假定ACCEL管脚上的电压保持一个常量,或者加速度值通过主机软件被设置为一个常量,MC3PHAC就会生成一个线速配置文件。为了获取其它类型的配置文件,当速度沿斜线上升时,加速度值必须动态变化。例如,为了获得抛物线速度配置文件,当速度沿斜线上升时,加速度必须在线性配置文件中变动。
MC3PHAC中的速度配置程序(velocity Profiler)不但要负责控制电机的速度,还要负责控制电机的电压,因为这两者在每赫兹伏特控制器中彼此相关。为了实施MC3PHAC中嵌入的所有功能,速度配置程序每秒需要进行很多计算,这会影响到速度更新的频率。如果计算频率太低,就会创建步进式速度配置文件,从而导致速度沿斜线上升时产生扭矩干扰和振动。
MC3PHAC采用两种技术来共同消除这个问题。第一种技术是速度整平,如图9所示。
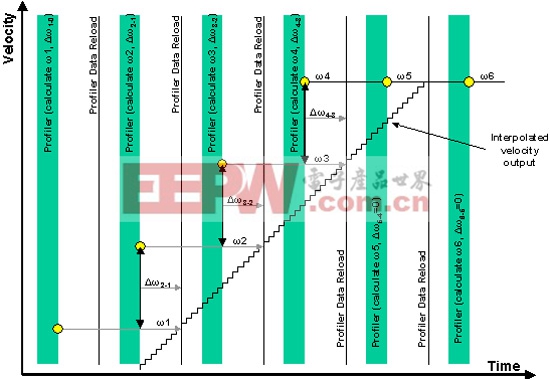
图 9. 速度整平(Velocity Pipelining)
各个垂直的分区表示PWM的更新间隔。正如我们所看到的,在每16个更新间隔上,触发一次速度配置程序以合成新的速度和电压信息。在图中,速度配置程序的第一次触发生成一个标为w2的速度。
然而,需要指出的是,应用到该电机的PWM波形直到后来才反映该转速。这种"整平"的作用允许PWM波形在原有的速度数据上构建,同时速度配置程序生成新的速度数据。由于速度配置程序的速度输出波形的绝对时间参照是任意的(过度再生情况中的减速放缓除外),这种速度整平表示的相位延迟将不会对系统造成负面影响。
为了进一步提高速度波形的分辨率,MC3PHAC还采用了一种修改技术,允许速度波形在每个PWM更新间隔上根据新的值进行更新。图10显示了一个速度上升的波形示例,其中来自配置程序的各个具体的速度输出值分别用一个圆点表示。这些更新每3或4μS发生一次(视PWM频率情况而定),在加速和减速过程中还可能导致电机达不到最优性能。
每次触发配置程序时,都会提供三个输出值,分别是原有速度、"delta"速度和调制指数(未在图10中显示)。在每个PWM更新间隔,delta速度值都会分成更细的速度增量。通过在每次更新PWM时把这些增量添加到原有的速度值中,就会生成一条新的速度曲线,该曲线增加了16x分辨率,所图10所示。因此,电机可以非常平稳地从一个速度过渡到另一个速度。
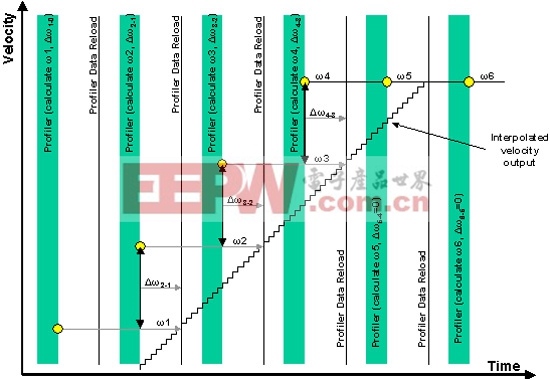
图10. 速度修改
系统监视和保护
由于MC3PHAC设计用来控制处理危险的高电压和高电流的逆变器,因此它融入了一系列系统监视和保护功能。在有些情况下,当探测到问题时,MC3PHAC会立即做出响应,努力降低故障的影响。在另外一些情况中, PWM会立即关
PWM 相关文章:
- 基于DSP的磁流变阻尼器的控制方法(04-14)
- 用DSP56F805 PWM模块输出高频正弦波(05-25)
- 一种基于DSP的新型单相PWM算法研究(08-14)
- 基于DSP的自动避障小车(04-05)
- 基于DSP的逆变电源控制系统研究(04-28)
- 基于DSP的感应电机SVPWM矢量控制系统(06-21)