面向低成本变速应用的“即用型“交流感应电机控制IC
与传统的正弦调制相比,它把相到相的调幅提高了15%。然而,由于这种调制技术会导致共模第三谐波频率成分,因此,它把MC3PHAC的使用限制在拥有浮接中心线(floating neutral)的三相负载上。此外,由于输出电压波形的总和不再为零,它还对三相输出的合成技术带来限制。
运行模式
MC3PHAC可以运行于以下两种模式之一:独立模式或主机模式。 模式选择在加电启动时根据管脚20的状态进行。下面将详细介绍这两种模式。
独立模式
在这种模式中,MC3PHAC运行参数通过连接到设备的无源组件来在加电启动时配置。一旦MC3PHAC确定没有外部主机(管脚20处于高电位),它就开始询问外部连接的电阻器网络以获取运行参数,如速度范围、停滞时间和电源稳压器等。其它参数在系统运行过程中继续实时输入,如开始/停止、前进/后退、电机速度、PWM频率、总线电压和加速度等。从系统的总成本角度看,独立模式是最经济的模式,因为在MC3PHAC运行时不需要主机控制器。图4显示了独立模式中使用MC3PHAC的电路示意图。
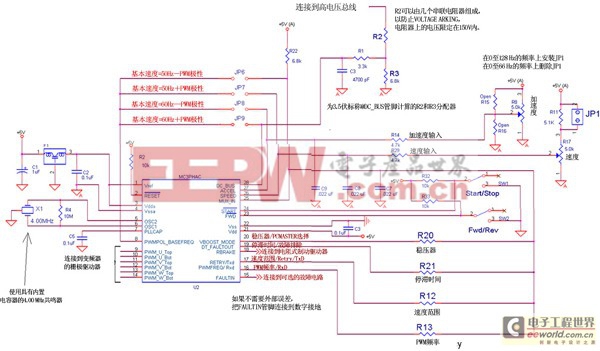
图4. 以独立模式运行的MC3PHAC示意图
主机模式
MC3PHAC的第二种运行模式称为主机模式,该模式利用一台运行主机软件(可以从摩托罗拉公司购买)的PC或模仿主机软件命令的微控制器。与使用离散组件来指定运行参数不同的是,它们直接从主机上通过软件进行控制。
在加电启动后,MC3PHAC可以通过读取管脚20的值(逻辑低电位)检测到外部主机。在MC3PHAC继续初始化,进入一个惰性的安全状态后,它仍然处于休眠状态,等待串行接口接到指定运行参数的命令。在接受到某些关键参数(如PWM极性和停滞时间信息等)前,MC3PHAC不允许激活电机。主机模式允许外部控制器监视并控制MC3PHAC运行的所有方面。与独立模式相比,它允许对系统的运行环境进行更全面的控制,详见下表。
| 名称 | 独立模式 | 主机模式 | 描述 |
| 命令 PWM 极性 | 上面和下面全为正或全为负, 频率为50 Hz或60 Hz | 下面正,上面正 下面正,上面负 下面负,上面正 下面负,上面负 频率为50 Hz或60 Hz | 指定 MC3PHAC PWM 输出的极性 |
| 停滞时间 | 5到6 μS | 0到32 μS | 指定PWM发生器 使用的停滞时间 |
| 故障超时 | 1 秒到 53秒 | 25秒到4.55小时 | 规定出现故障后 重新启动电机前的延迟时间 |
| 电源稳定器 | 0%到35% | 0%到100% | 零赫兹电压 |
| 最大电压 | 固定为100% | 0%到100% | 允许的最大调制指数值 |
| 总线电压 Decel 值 | 固定为标称Vbus的 110% | 标称Vbus的 0% 到143% | Vbus读数高于此值时 会导致速度下降 |
| 总线电压 Rbrake 值 | 固定为标称Vbus的 110% | 标称Vbus的 0% 到143% | Vbus读数高于此值时 导致R Brake pin出现 |
| 总线电压 Brownout 值 | 固定为标称Vbus的 50% | 标称Vbus的 0% 到143% | Vbus读数低于此值 导致低压故障 |
| Vbus 过压值 | 固定为标称Vbus的 125% | 标称Vbus的 0% 到143% | Vbus读数高于此值 导致过压故障 |
在主机模式中,我们甚至可以通过互联网进行远程控制。通过运行连接到MC3PHAC的独立服务器应用(也可以从摩托罗拉购买),运行前面提到的主机软件的远程计算机可以从世界的一个地方对另一个地方的电机进行控制。
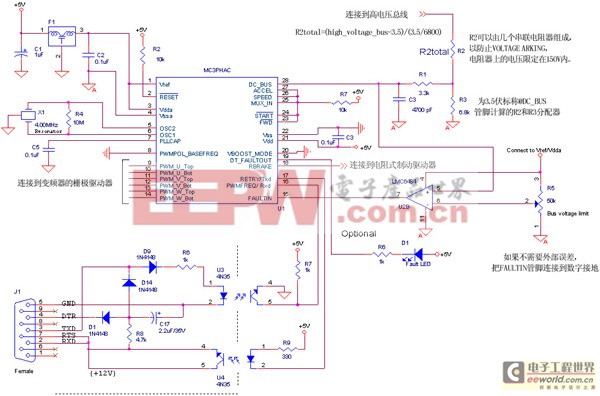
图5. 主机模式下的MC3PHAC 示意图
主机模式下使用MC3PHAC的电路示例如图5所示。
图 6 显示了使用摩托罗拉接口主机软件控制MC3PHAC的GUI。

图 6. MC3PHAC使用的主机软件GUI界面
总线涟波消除
在很多交流驱动中,变频器由一个拥有较大并联连接的电容器(作用如同一个能量库)的直流总线供电。为了防止总线上的波动影响到电机波形,该电容器的容量通常设计得很大,特别是使用标准的整流器为总线供电时。这些波动可能是交流电源线上产生的电涌造成的,也可能是电机快速减速的再生,甚至可能是由交流电路整流引起的更高频率波动。由于MC3PHAC采用较高的总线反馈取样频率,所有这些失真都可以进行补偿。根据PWM频率,每189或252μS取样DC_BUS输入管脚,读数被用来实时补偿调制指数以调整电机电流。尽管很多交流驱动都实施相似的功能,但由于它们的总线电压取样频率太低而不能进行实时涟波去除,因此它们只能对较低的频率失真进行补偿。
请参见图7,假设晶体管以零停滞时间以补充方式驱动,定义输出波形平均电压的方程式如下:
方程式1
其中,![]() 表示平均输出电压th(t)表示PWM波形的峰值时间 T表示PWM时间段Vbus(t)表示直流总线的电压
表示平均输出电压th(t)表示PWM波形的峰值时间 T表示PWM时间段Vbus(t)表示直流总线的电压
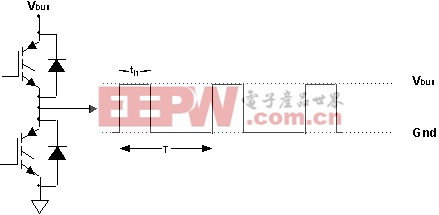
图7. 从半桥中生成的PWM波形
需要注意的是,方程式1并没有假定Vbus 是一个常量,而是时间T的一个函数。然而,让我们假设Vbus有一个最合适的值,并把这个值称为Vnorm,这样一来,当Vbus(t)等于Vnorm时,根据指定的PWM高时间和时段,![]() 就等于
就等于 值。然而,当Vbus(t)不等于Vnorm时,通过在方程式1中为调制项 th(t)/T应用一个修正因子,
值。然而,当Vbus(t)不等于Vnorm时,通过在方程式1中为调制项 th(t)/T应用一个修正因子,![]() 仍然有可能和l相等,如方程式2所示。
仍然有可能和l相等,如方程式2所示。
PWM 相关文章:
- 基于DSP的磁流变阻尼器的控制方法(04-14)
- 用DSP56F805 PWM模块输出高频正弦波(05-25)
- 一种基于DSP的新型单相PWM算法研究(08-14)
- 基于DSP的自动避障小车(04-05)
- 基于DSP的逆变电源控制系统研究(04-28)
- 基于DSP的感应电机SVPWM矢量控制系统(06-21)