基于FPGA的搬运机器人控制系统
3 机器手控制器
机器手主要完成升、降、抓紧和放下物品等工作。机器手控制器结构图如图4所示。主要由手臂指令模块和手臂执行模块组成。机器手控制器实现的控制主要是一个顺序控制的问题。当手臂指令模块发出取物品的命令时,手臂执行模块将产生取物品的一系列顺序信号,驱动手臂电机,完成机器手取物品的工作。在取物品时,首先将手臂升降到指定位置,夹紧物品并保持;然后将整个物品提升或下降到位,整个取物品的操作结束。机器手放物品与取物品的工作相似。机器手必须是在机器人行走到指定位置时才能进行操作,行走计数值和超声波与光电检测信号为手臂指令模块提供机器人行走到位信号。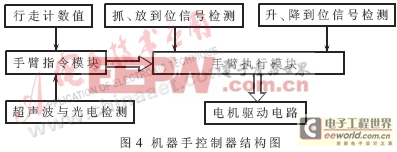
3.1 手臂指令模块
手臂指令模块与行走部分的行走指令模块相似。这个模块比行走指令模块只是多了超声波与光电检测信号。为了提高机器手的可靠性,采用了双重检测,由行走计数值检测是否已进入物品区域,并且通过超声波与光电信号检测机器手是否已达到取放物品的位置。若缺一个条件,机器人将不会发出取物品或放物品的指令。
3.2 手臂执行模块
手臂执行模块主要是根据手臂指令模块发出的指令,产生一系列输出信号,驱动手臂电机。此模块的设计也运用了有限状态机的设计思想,采用的是顺序控制的原理。可是手臂存在一个初始位置的问题,例如要取物品时,它的手臂必须是松开的,并且处于某个初始位置。因此每次取物品时,都要检测是否处在这个初始位置,若不是,则要先调整到初始位置,然后按照取物品顺序进行操作。
手臂执行模块状态图如图5所示。s0、s1、s2 状态为未到位状态(初始位置),需要进行状态调整,跳转到s3状态。s3为初始到位状态,当接收到取物品信号(ud=“01”)时,跳转到s4状态(抓紧物品); s5状态为提升到位,s8为保持状态,最后回到初始位置s3状态。s6、s7状态为放物品状态,与取物品过程相似。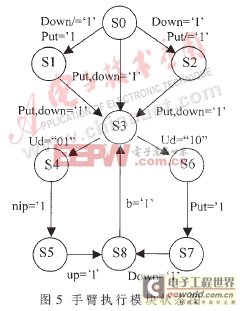
本搬运机器人除了以上介绍的机器人行走控制器和机器手控制器外,还有其它单元电路,如红外光电检测电路、超声波检测电路、光电码盘检测电路和电机驱动电路。为了随时接收上位机发出的指令,还需要通讯模块电路。为了实现机器人可靠地运行,检测电路的设计显得非常重要。
本设计是在QUARTUSII开发工具下对各功能模块进行仿真分析,保证了FPGA芯片设计的成功。FPGA器件采用ALTERA公司的ACEX1K50器件,占用ACEX1K50器件的逻辑单元为43%。由于篇幅有限,各功能模块用硬件描述语言编写的源文件省略。
由于采用有限状态机描述和硬件描述语言进行设计,该控制系统不仅在运行方式上类似于单片机控制器,而且在运行速度和工作可靠性方面优于单片机控制器。实际运用表明该控制系统完全满足要求。
机器人 相关文章:
- 基于DSP的机器人视觉伺服系统研究(04-17)
- 基于DSP的自动避障小车(04-05)
- 基于DSP的双足机器人运动控制系统设计(06-21)
- 用于日本震后救援的机器人技术(03-03)
- 基于TMS32OLF2407A的教育机器人硬件系统设计 (08-21)
- 基于DSP的覆冰机器人控制系统设计(02-13)