基于51单片机的超声波测距仪LED显示电路的设计
1 引言
随着科学技术的快速发展,超声波将在测距仪中的应用越来越广。但就目前技术水平来说,人们可以具体利用的测距技术还十分有限,因此,这是一个正在蓬勃发展而又有无限前景的技术及产业领域。展望未来,超声波测距仪作为一种新型的非常重要有用的工具在各方面都将有很大的发展空间,它将朝着更加高定位高精度的方向发展,以满足日益发展的社会需求,如声纳的发展趋势基本为:研制具有更高定位精度的被动测距声纳,以满足水中武器实施全隐蔽攻击的需要;继续发展采用低频线谱检测的潜艇拖曳线列阵声纳,实现超远程的被动探测和识别;研制更适合于浅海工作的潜艇声纳,特别是解决浅海水中目标识别问题;大力降低潜艇自噪声,改善潜艇声纳的工作环境。无庸置疑,未来的超声波测距仪将与自动化智能化接轨,与其他的测距仪集成和融合,形成多测距仪。随着测距仪的技术进步,测距仪将从具有单纯判断功能发展到具有学习功能,最终发展到具有创造力。在新的世纪里,面貌一新的测距仪将发挥更大的作用。
随着科技的发展,人们生活水平的提高,城市发展建设加快,城市给排水系统也有较大发展,其状况不断改善。但是,由于历史原因合成时间住的许多不可预见因素,城市给排水系统,特别是排水系统往往落后于城市建设。因此,经常出现开挖已经建设好的建筑设施来改造排水系统的现象。城市污水给人们带来了困扰,因此箱涵的排污疏通对大城市给排水系统污水处理,人们生活舒适显得非常重要。而设计研制箱涵排水疏通移动机器人的自动控制系统,保证机器人在箱涵中自由排污疏通,是箱涵排污疏通机器人的设计研制的核心部分。控制系统核心部分就是超声波测距仪的研制。因此,设计好的超声波测距仪就显得非常重要了。这就是我设计超声波测距仪的意义。
2 总体设计方案
2.1 设计思路
2.1.1超声波测距仪的设计思路
超声波是指频率高于20KHz的机械波。为了以超声波作为检测手段,必须产生超生波和接收超声波。完成这种功能的装置就是超声波传感器,习惯上称为超声波换能器或超声波探头。超声波传感器有发送器和接收器,但一个超声波传感器也可具有发送和接收声波的双重作用。超声波传感器是利用压电效应的原理将电能和超声波相互转化,即在发射超声波的时候,将电能转换,发射超声波;而在收到回波的时候,则将超声振动转换成电信号。
超声波测距的原理一般采用渡越时间法TOF(time of flight)。首先测出超声波从发射到遇到障碍物返回所经历的时间,再乘以超声波的速度就得到二倍的声源与障碍物之间的距离
测量距离的方法有很多种,短距离的可以用尺,远距离的有激光测距等,超声波测距适用于高精度的中长距离测量。因为超声波在标准空气中的传播速度为331.45米/秒,由单片机负责计时,单片机使用12.0MHZ晶振,所以此系统的测量精度理论上可以达到毫米级。
由于超声波指向性强,能量消耗缓慢,在介质中传播距离远,因而超声波可以用于距离的测量。利用超声波检测距离,设计比较方便,计算处理也较简单,并且在测量精度方面也能达到要求。
超声波发生器可以分为两类:一类是用电气方式产生超声波,一类是用机械方式产生超声波。本课题属于近距离测量,可以采用常用的压电式超声波换能器来实现。
2.12超声波测距原理
发射器发出的超声波以速度υ在空气中传播,在到达被测物体时被反射返回,由接收器接收,其往返时间为t,由s=vt/2即可算出被测物体的距离。由于超声波也是一种声波,其声速v与温度有关,下表列出了几种不同温度下的声速。在使用时,如果温度变化不大,则可认为声速是基本不变的。如果测距精度要求很高,则应通过温度补偿的方法加以校正。
表1 超声波波速与温度的关系表
温度(℃)
-30
-20
-10
0
10
20
30
100
声速
(m/s)
313
319
325
323
338
344
349
386
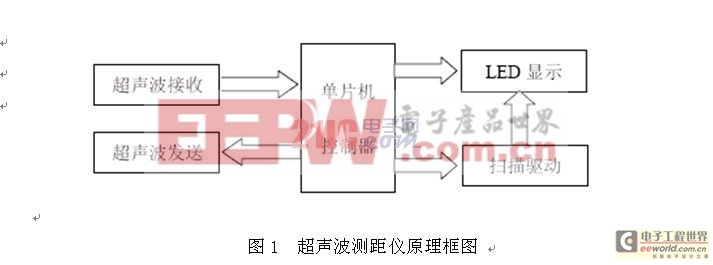
2.2 超声波测距仪原理框图
根据设计要求并综合各方面因素,可以采用AT89S51单片机作为主控制器,用动态扫描法实现LED数字显示,超声波驱动信号用单片机的定时器完成,超声波测距器的系统框图如图1.
3.设计原理分析
3.1 系统组成
3.1.1硬件部分
主要由单片机系统及显示电路、超声波发射电路和超声波检测接收电路三部分组成。采用AT89S51来实现对超声波发射和接受处理模块的控制。单片机通过P1.0引脚经反相器来控制超声波的发送,然后单片机不停的检测INT0引脚,当INT0引脚的电平由高电平变为低电平时就认为超声波已经返回。计数器所计的数据就是超声波所经历的时间,通过换算就可以得到传感器与障碍物之间的距离。
3.1.2软件部分
主要由主程
- 关于RTX51 TINY的分析与探讨(05-30)
- 浅析8051模块化编程技巧(05-28)
- 基于DSP和单片机通信的液晶显示设计方案(07-20)
- 锁相环控制及初始化简析(08-27)
- 基于MSP430自动胀管控制器的研究(09-07)
- 嵌入式C实现延时程序的不同变量的区别(03-01)