智能液体点滴监控系统的设计
智能液体点滴监控系统主要应用在静脉输液以及化学医学领域实验中需要精确滴定的场合[1]。本装置可以实现对液体点滴滴速的控制与检测,控制范围为每分钟30~120滴,控制精度为±2滴,还可以在药液不足及输液不畅时自动报警,并停止输液。
1 系统总体方案
因为医用,所以任何与瓶中液体有接触的设计方案都是不可行的,所有传感器和控制器只能固定于输液的外部。具体设计方案如图1所示。
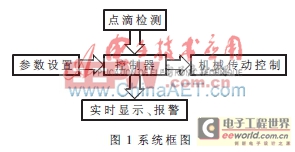
(1)点滴检测:要求系统能够正确及时地探测下落的点滴数。通过红外发射对管实现对点滴速度的检测。
(2)控制器:实现对传感器输出信号的采集来计算点滴速度,通过对滴速的计算和设置数值的比较来控制电机的转速,从而实现闭环控制。通过计算输液量来判断输液是否正常。
(3)机械传动控制:包括机械传动和控速,兼顾稳定性、精确性、可操作性、廉价。
(4)实时显示、报警:包括实时显示电路、报警电路和按键电路,兼顾实用性、可操作性、廉价且满足设计要求。
2 电路实现
2.1 滴速测量
本设计采用直射式光电传感器(红外对管)来实现点滴速度的检测。利用一个具有一定硬度且反射性很差的塑料管,把红外对管分别装在两侧,水滴从两管之间通过,有液滴滴下时,下落的水滴对红外光有较强的漫反射、吸收及一定的发散作用,可使接收管导通或截止。约外对管测速示意图如图2所示。
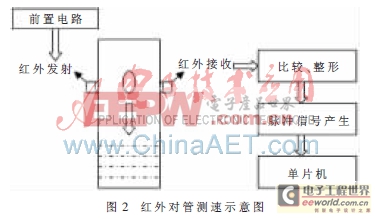
图2中比较环节采用LM393实现,红外接收管与LM393的反相输入端相连。当无水滴下落时,红外接收管接收到红外线照射,此时红外接收管的压降最低,LM393反向输入端的电位也最低,调节同向输入端的电位,使之略大于此时的反向输入端电位,使其输出高电平。
当有水滴下落时,红外线被水滴折射或遮挡,红外接收管上的压降增大,LM393反向输入端电位升高,大于同向输入端的电位,输出低电平,从而触发单片机的外部中断。
2.2 机械传动控制的设计
对于机械传动部分的设计,这些有滑轮方案、拉绳索方案、注射泵方案等,但这些方案或是装置变复杂,或者成本太高均不可取。本设计在确保测量精度的同时,以降低成本并简化电路为原则,采用指状蠕动泵和步进电机来实现。单片机控制步进电机带动蠕动泵实现对滴速的控制,软件根据检测结果实现对控制电路的自适应调节,通过按键或上位机软件实时设置点滴速度。
在本系统中,蠕动泵采用的是二相式步进电机,结合实验数据得出步进电机每旋转360°为蠕动泵一个周期,滴下3个水滴。步进电机步距角为1.8°,为提高精度,在此使用四相八拍脉冲信号驱动电机工作。此时一个脉冲周期为7.2°,即经过50个脉冲周期即可旋转一周。
2.3 显示电路
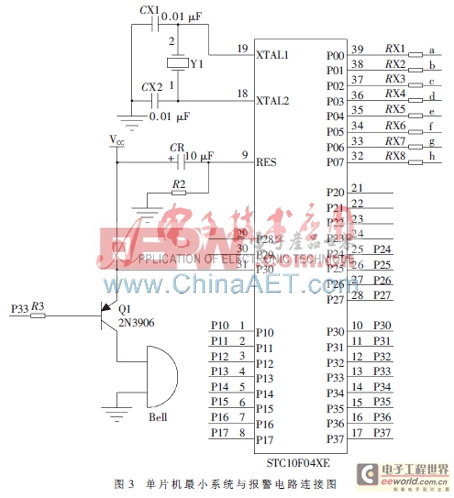
单片机STC10F04XE的I/O口可配置为双向I/O,不仅可以像普通51单片机一样输送电流,而且可以向外提供20 mA的上拉电路[2]。这就使得驱动数码管变得更为简单。本设计使用共阳数码管,4个选位端输入电流,电流从8个段码经过8个330 Ω的限流电阻流入单片机。
2.4 报警电路
报警电路如图3所示。根据储液瓶容量,通过软件计算出一定容量的输液瓶中的液滴滴数,当输液完成时蜂鸣器发出警报。
2.5 按键电路
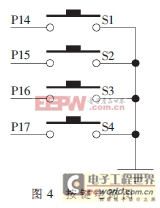
按键电路如图4所示。采用单列四按键,其中S1键为菜单键,此菜单键含有三个子菜单分别是:床位号、输液量、液滴滴速。通过按动菜单键可以选择目前所需要设置的子菜单。S2键为设置数值的增加键,S3键用来设置数值的递减,S4键是启动键,设置好前面的三个键后,按动S4键仪器正式开始工作。
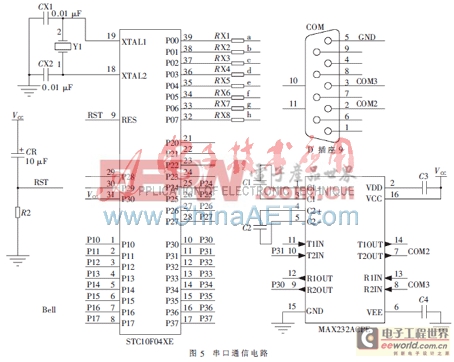
2.6 串口通信电路
数据通信采用三线制,将单片机与PC串口的3个引脚(RXD、TXD、GND)分别连在一起,即将PC和单片机的发送数据线TXD与接收数据线RXD交叉连接,两者的地线GND直接相连,而其他信号线如握手信号线均不用,采用软件握手的方式,这样既可以实现预定的任务,又可以简化电路设计。
但由于单片机的TTL逻辑电平和RS-232C的电气特性完全不同,RS-232C的逻辑0电平规定为+3 V~+15 V之间,逻辑1电平为-3 V~-15 V之间,因此,在将PC和单片机的RXD、TXD交叉连接时必须进行电平转换,本设计使用的是MAX232电平转换芯片,其电路如图5所示。
3 系统软件设计
本系统因涉及步进电机及数码管的驱动控制,所以需要使用2个定时器,而串口通信又需要使用定时器或独立波特率发生器,而且考虑到程序执行速度,采用普通的8051单片机不能满足需求,故使用STC10F04XE单片机。
STC11/10xx系列单片机是宏晶科技设计生产的单时钟/机器周期(1 T)的单片机,是高速/低功耗/超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快8~12倍[3]。内部集成有高可靠复位电路,适用于对高速通信、智能控制、强干扰场合。程序流程图如图6所示。
- 基于Winodws CE的嵌入式网络监控系统的设计与实现(03-05)
- 基于MPEG-4的嵌入式多媒体监控系统中压缩/解压卡的设计与实现(10-15)
- 基于嵌入式Linux的远程监控系统的设计(11-25)
- 采用DSP的铁路道口图像监控系统设计(02-01)
- 基于DSP芯片TMS320DM642的嵌入式无线视频监控系统设计(01-11)
- 双DSP的多路视频监控系统设计(02-14)