利用MSP430F41单片机定时器实现信号采样和PWM控制
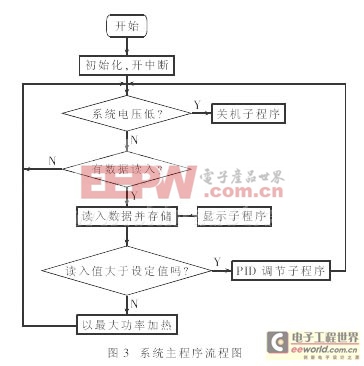
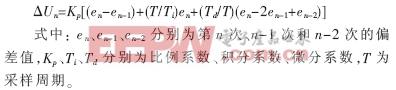
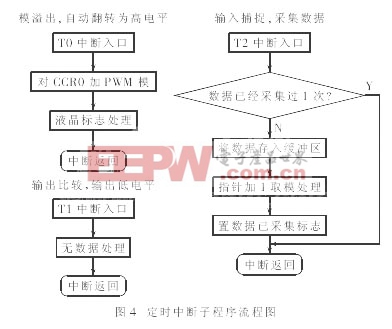
载驱动电路将单片机P1.2引脚输出的PWM信号放大滤波,用于驱动大功率的执行元件。 3 软件设计 3.1 系统主程序 在主程序中包括系统初始化、定时器的初始化、温度采样值的读入、负载驱动和显示等。系统进行温度值采样和PWM输出均在定时中断内完成,PWM输出脉冲的占空比则由PID算法得到。系统主程序流程图如图3所示。 3.2 PID脉宽调节 系统对脉宽的调制由PID算法实现。根据算法原理,本系统设计了一套完全由软件实现的PID算法,并且在控制过程中完成参数的自整定。PID调节的控制过程:单片机读出数字形式的实际温度Tn,然后和设定温度Tg相比较,得出差值en=Tn-Tg,根据en的正负和大小,调用PID公式,计算得到与输出电压Δun一致的占空比,调节温度的升降,同时寻找最优条件,改变PID参数。 增量式PID控制算法的输出量[3]: PID调节程序直接写入单片机内,根据得到的值改变计数器CCR1的基数值,从而改变输出脉冲的占空比,达到调节PWM的目的。 3.3 定时中断 定时中断子程序流程如图4所示。系统采用的晶振频率为2MHz,T0中断的作用是得到频率为50Hz、占空比为90%的方波,用以产生三角波,并检查1个周期内是否有漏采的数据。T0模溢出翻转为高电平,输出比较间隔为18ms。其中,CCR0加了PWM的模,该值即为CCR0和CCR1的差值,用以产生输出所需的脉冲宽度。 T1中断内处理的是控制端口的PWM输出,并检查1个周期内是否重复采集数据,T1输出比较产生低电平,输出比较间隔为20ms。T2中断捕捉温度测量端口的脉宽,得到所测的温度值。 4 结束语 利用单片机MSP430F413内的定时器Time_A进行温度采样以及实现PWM调节的方法,可以广泛用于具有端口捕捉功能的单片机中。与传统方法比较,它不仅可以简化测量和控制电路的硬件结构,而且可以方便地建立人机接口,实现用软件调整参数,使控制更精确、实时、可靠。经过实验,该方法应用于温度控制系统中获得了预期的精确PWM调节波形。该方法同样可以用于其他单片机控制系统中。 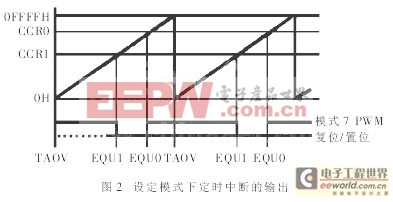
- 基于MSP430F413与贴片电阻的智能遥控器(12-24)
- 基于MSP430F41的IC卡式智能水表工作原理(03-16)
- 基于DSP的磁流变阻尼器的控制方法(04-14)
- 基于DSP并使用SPWM控制技术的变频器实现方案(12-21)
- 飞思卡尔那些事之PWM控制直流电机(11-23)
- 51单片机IO模拟PWM控制舵机转向(11-22)