基于51单片机的交流伺服电机转速控制系统研究
1 交流伺服电机控制系统设计方案
系统使用的交流伺服电机为三相交流电机;驱动器控制U/V/W三相电形成电磁场;转子在此磁场的作用下转动,同时电机由接近传感器将转速信号反馈给驱动器;驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。
2 系统硬件设计
本项目实质上采用STC89C52RC单片机构建一个最小系统,实现脉宽可调输出控制两个继电器,实现电机正反转智能控制,从而实现伺服电机的精确位移控制。控制系统组成如图1所示。
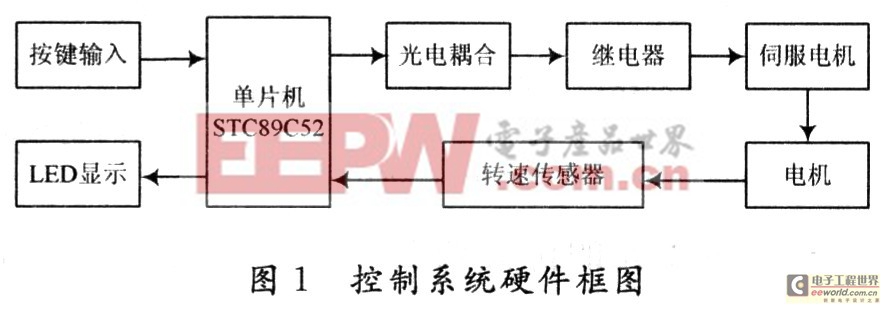
通过按键输入电机所需的转速值并与转速传感器反馈回来的电机转速相比较,采用PID算法,经单片机处理后,转化成相应的脉冲信号,再经光电耦合器调节继电器的开度,通过调节继电器的脉冲宽度,达到脉宽的调制,从而控制伺服电机上的磁块正负位移,使电机达到给定的转速值,同时单片机接受固定在伺服电机转轴上的转速传感器随着电机转动而产生的反馈脉冲信号,并在LED实时显示电机的实际转速。
2.1 单片机控制器的硬件设计
在此开发了一套运动控制器的软件系统。该系统的硬件结构是基于单片机而开发的,所用功能为外部中断、定时中断、检测传感器脉冲信号、及输入/输出等。STC89C52RC的P0.0,P0.1,P0.2端口分别作为按键SET、按键MOVE、按键UP的输入口,通过STC89C52定时器T0的定时中断控制脉冲发送频率,进而控制电机的转速。系统原理图如图2所示。

2.2 驱动部分电路的硬件设计
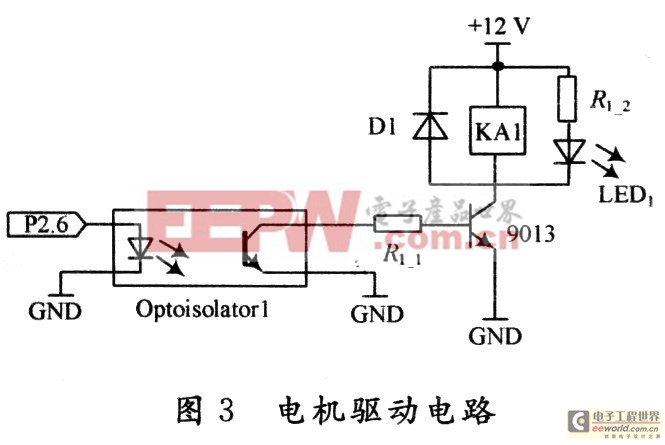
由于单片机属于TTL电路(逻辑1和0的电平分别为2.4 V和0.4 V),其I/O口输出的开关量控制信号电平无法直接驱动电机,所以在P2.6口控制升速信号输出端需加入驱动电路;同理该驱动电路也应用于P2.7口的降速输出端。系统采用光耦耦合器和晶体管作驱动,由光电耦合器输出通道传入控制电机,所以具有很强的抑制噪声干扰能力,起隔离作用,可防止强电磁干扰;晶体管主要起功率放大作用。电机驱动电路如图3所示。
3 系统软件设计
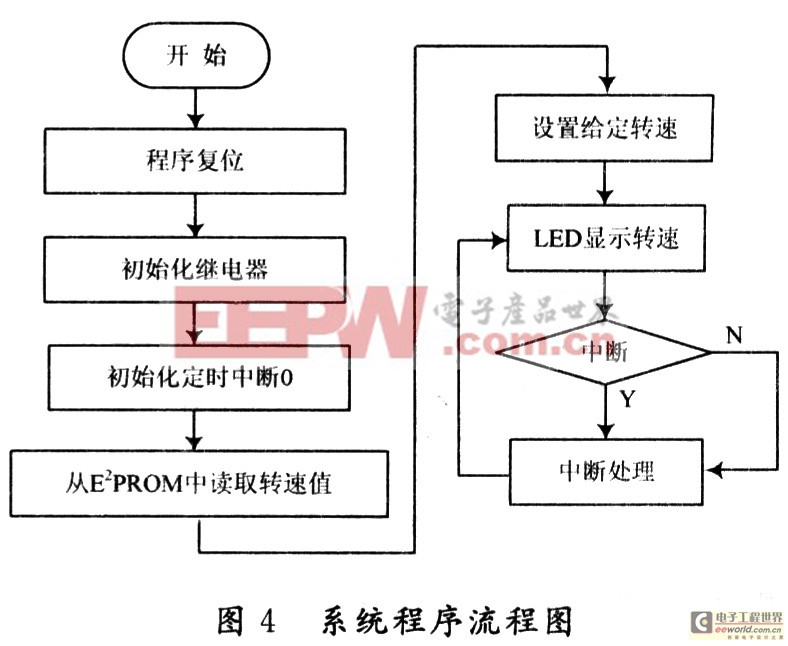
控制器的软件主要完成LED显示,接受键盘输入,实现伺服电机匀速运行和继电器控制几项功能,包括主程序、按键中断服务程序、定时器T0中断服务程序及LED显示子程序。在交流伺服电机控制系统中,单片机的主要作用是产生脉冲序列,它是通过STC89C52RC的P3.2口发送的。系统软件编制采用定时器定时中断产生周期性脉冲序列,不使用软件延时,不占用CPU。CPU在非中断时间内可以处理其他事件,惟有到了中断时间,才驱动伺服电机转动一步。系统程序流程图如图4所示。
3.1 按键预置子程序
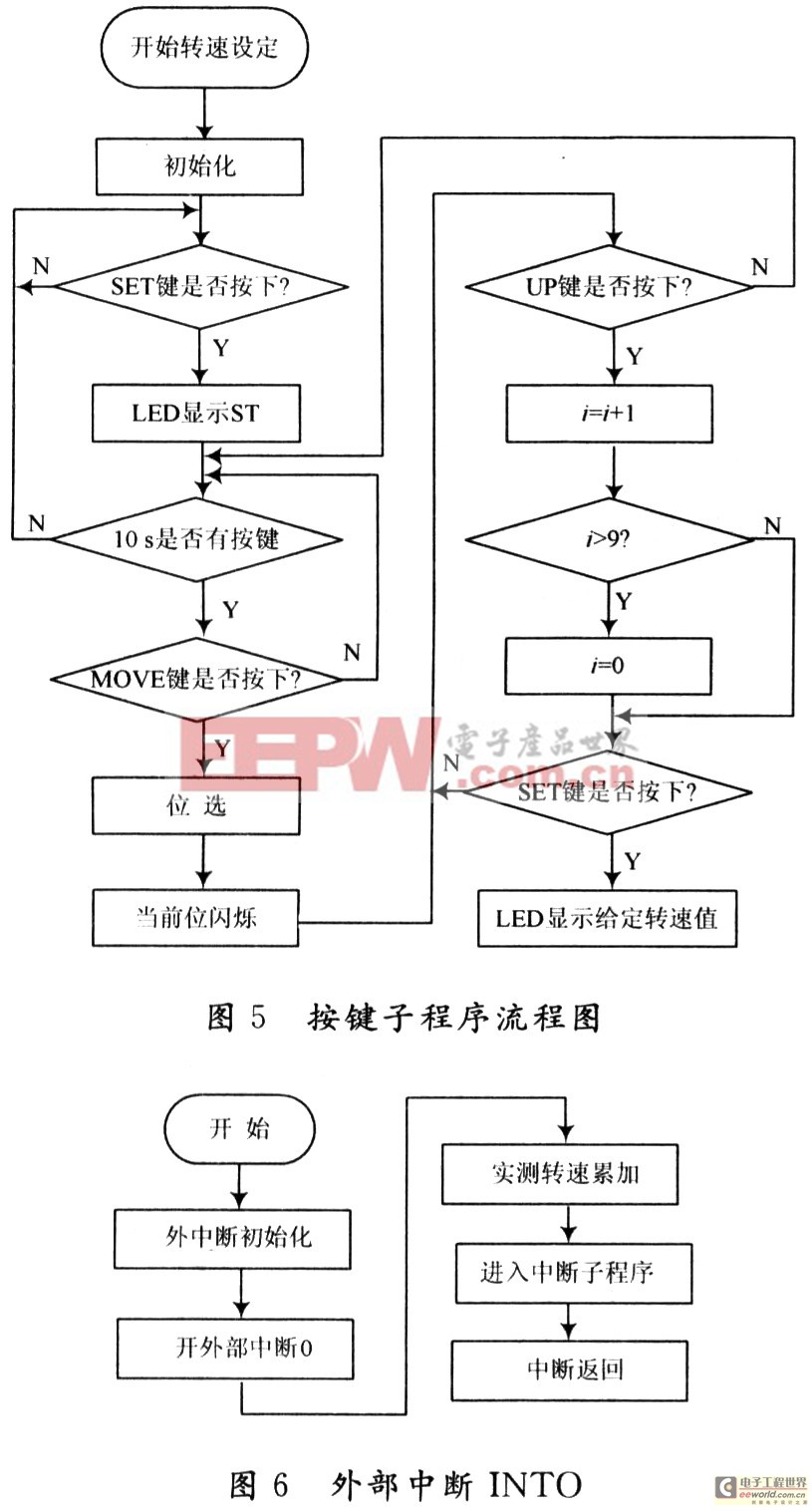
面板上有3个键与该子程序相关,它们是SET,MOVE和UP,其功能分别是:SET用来确定设定位,共有4位,包括个位、十位、百位和千位;MOVE用来选择那一位;UP控制被控位的增加,每次增加,在0~9之间循环。当用户确定其输入时可按键SET,程序便根据输入的值确定伺服电机工作时的给定转速,最后,将设定值存人对应的变量中,按键子程序流程如图5所示。
3.2 定时中断服务子程序
电机每转动1圈,单片机就中断1次。通过检测两次中断的时间间隔,即通过定时器的计数,就可以算出电机转速。为了实现转速检测需将转速中断配置为最高中断优先级INTO。中断计数的程序框图如图6所示。
3.3 转速的PID控制算法
作为模糊控制和PID控制相结合的产物,模糊自适应PID控制除具有调速范围宽,调节速度快和不要求掌握受控对象的精确数学模型等优点外,还具备结构简单、容易实现的特点。根据直线电机位置运动规律,模糊自适应PID控制的基本思想是:当误差大时,需加大误差控制作用的权重,以快速消除误差,提高系统响应速度;当误差小时,需加大误差变化量控制作用的权重,以避免超调使系统尽快进入稳态。根据上述规律,可设计模糊自适应PID控制系统的模糊推理规则表。表1给出KP的模糊调整规则实例。其中,e(k)和△e(k)分别为位置误差及其变化量。模糊推理规则形式为:
- 关于RTX51 TINY的分析与探讨(05-30)
- 浅析8051模块化编程技巧(05-28)
- 基于DSP和单片机通信的液晶显示设计方案(07-20)
- 锁相环控制及初始化简析(08-27)
- 基于MSP430自动胀管控制器的研究(09-07)
- 嵌入式C实现延时程序的不同变量的区别(03-01)