角位置检测系统及其在电动助力转向系统中的设计与应用
4.6 VC0相位补偿

4.7 偏置调整
积分器输入端的漂移与偏置电流会引起变换器输出端额外的位置漂移,如果能忽略漂移,则可省略R8,R9,否则应取R8=4.7M ,R9=1M (电位器)。为了减小零点漂移,首先选择好AD2S83的外围元件,并断开AD2S83与旋转变压器的连接,然后连接COS与REFERENCE INPUT两个引脚,SIN与SIGNAL GROUND两个引脚,加上电源与参考信号后,调节电位器R9,使输出为全“0”。
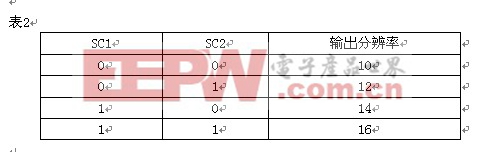
4.8 输出分辨率的选择
AD2S83的输出分辨率可以通过SC1,SC2 两个管脚的逻辑状态被用户设置为lO,12,14,16位,具体见表2
5 AD2S83在EPS系统中的应用
EPS板保温体系是由特种聚合胶泥、EPS板,耐碱玻璃纤维网格布称和饰面材料组成。集保温、防水、防火,装饰功能为一体的新型建筑构造体系。该技术将保温材料置于建筑物外墙外侧,不占用室内空间,保温效果明显,便于设计建筑外形。EPS泡沫是一种热塑性材料,每立方米体积内含有300--600万个独立密闭气泡,内含空气的体积为98%以上,由于空气的热传导性很小,且又被封闭于泡沫塑料中而不能对流,所以EPS是一种隔热保温性能非常优良的材料。 用途:用于建筑内外墙保温、地热采暖、冷库、冷藏室、轻体房、低温箱、保鲜箱 产品规格(mm):尺寸:1250×6000×600 1000×2000×500 厚度:0.5-600 注:按用户要求生产各种规格 技术指标 密度(kg/m3):15-30 导热系数(W/mh):0.041 抗拉强度(kg/m2):2.5-3.5 尺寸稳定性使用温度(℃):+70
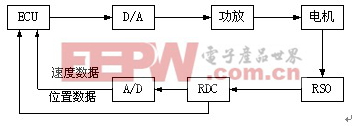
电动助力转向系统必须满足很高的实时性和较高的精度要求,同时要确保其具有高的可靠性。基于无刷旋转变压器与AD2S83集成电路的优点,选用高可靠性的无刷旋转变压器与AD2S83构成这EPS系统角位置检测系统,并以AD2S83的模拟速度输出信号作为速度反馈信号构成EPS系统的速度回路是设计这些EPS系统时较好的选择。系统框图见图2。
5.1位置检测单元硬件电路设计及实现

在具体实现该电路时应注意十Vs,-Vs 与 ANALOG GROUND 之间,+VL与DIGITAL GROUND之间要分别并联100uF(陶瓷)和lOuF(钽)的去耦电容,它们应尽量靠近AD2S83变换器放置,而且每个变换器都应有自己单独的去耦电容。旋变的两个信号接地端应连到变换器的SIGXAL GROUND管脚,以减少正、余弦信号间的耦合,另外,旋变的正、余弦信号以及参考信号最好分别使用双绞屏蔽线。
5.2 AD2S83与单片机的连接
下面介绍单片机对AD2S83 RDC的操作,在此之前先对AD2S83变换器的控制信号加以简单的说明:
根据系统的性能指标,选择分辨率为12bit,励磁频率为5KHz,最大跟踪频率为260rps,带宽为520Hz。按照上述计算方法选定AD2S83的外围元件后,即可设计出速度反馈与位置检测电路。硬件连接图如下:
![]()
输入:

信号只禁止可逆计数器向输出锁存器传送数据,并不打断跟踪环的工作,释放该信号将自动产生一个BUSY,并刷新输出锁存器。
![]()
输入:
![]()
信号决定了输出数据的状态,高电平时,输出数据管脚保持在高阻状态。低电平时,允许输出锁存器中的数据传送到输出管脚上。对
![]()
的操作不会影响变换器的工作。
BYTESELECT输入:无论该信号的状态如何当
![]()
为低电平时,低位字节就将出现在数据输出线DB9—DBl6上。当BYTE SELECT为高电平时.高8位字节将出现在数据输出线DBl—DB8上;当BYTE SELECT为低电平时,低8位字节将出现在数据输出线DBl—DB8上.它们同时也出现在DB9—DBl6上。
速度信号:速度信号是由积分器输出的与速度成正比的直流信号,在许多情况下可以使用该信号代替传统的测速发动机。
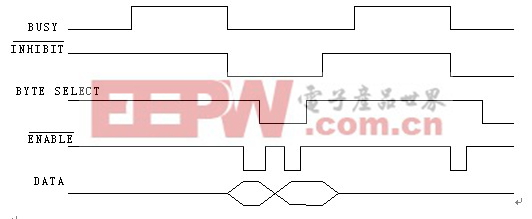
5.3单片机对AD2S83读取数据的过程:
首先对AD2S83施加
![]()
信号,阻止锁存器的刷新.当
![]()
被置为低电平并延迟600ns后数据有效.单片机对BYTE SELECT 操作,把
![]()
信号置为低电平后,读完数据后,应立即释放
![]()
信号.把它置为高电平.以使输出锁存器能被刷新.该过程可以通过下面的时序图来表示:
6 结束语
本文介绍了AD2S83RDC集成电路的应用,并设计了由该集成电路和旋转变压器构成的EPS系统中位置检测系统,并已成功的应用到市科委在汽车学院的EPS项目当中。经实践表明,该系统具有误差小、实时性好、可靠性高、抗干扰能力强等优点。
转向系统 设计 应用 助力 电动 检测系统 及其 位置 相关文章:
- 采用PIC16F877单片机的汽车电动助力转向系统控制(01-02)
- 采用PIC单片机的汽车电动助力转向系统(12-03)
- 基于DSP的电动助力转向系统的设计(07-12)
- 主动前轮转向控制技术的现状与发展趋势(05-18)
- 基于FPGA的DSP设计方法(08-26)
- 电力电子装置控制系统的DSP设计方案(04-08)