嵌入式DSP运动控制器的开发
运动控制器就是控制电动机的运行方式:比如电动机在由行程开关控制交流接触器而实现电动机拖动物体向上运行达到指定位置后又向下运行,或者用时间继电器控制电动机正反转或转一会停一会再转一会再停。运动控制(MC)是自动化的一个分支,它使用通称为伺服机构的一些设备如液压泵,线性执行机或者是电机来控制机器的位置和/或速度。运动控制在机器人和数控机床的领域内的应用要比在专用机器中的应用更复杂,因为后者运动形式更简单,通常被称为通用运动控制(GMC)。运动控制被广泛应用在包装、印刷、纺织和装配工业中。
1 系统的构成与工作原理
1.1 系统的构成
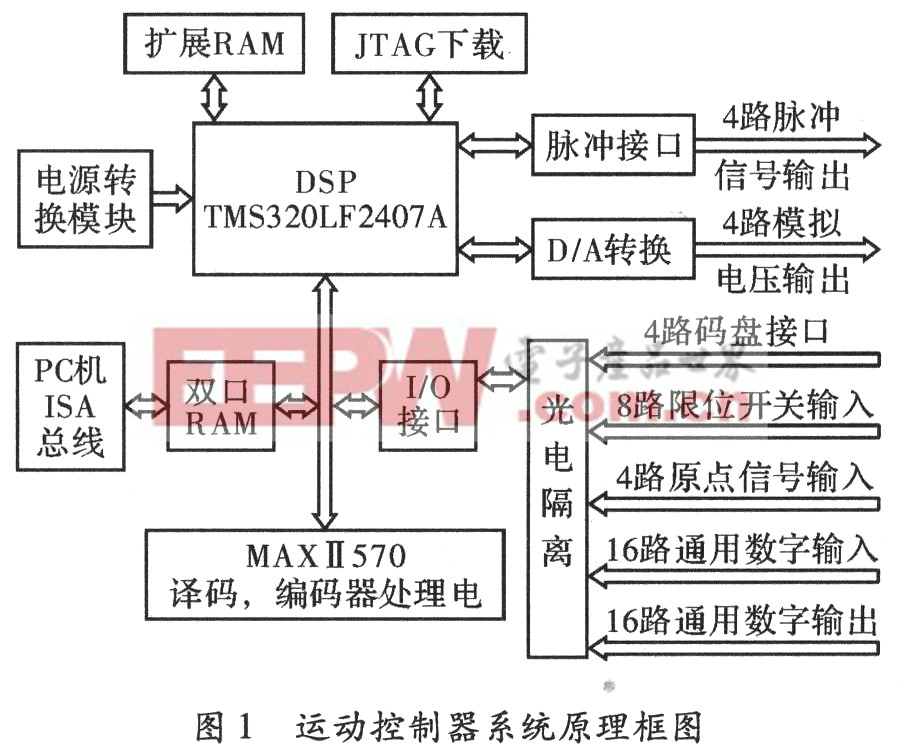
系统构成如图1所示,包括电源转换模块、DSP外围电路、脉冲输出电路、编码器信号采集和处理电路、D/A输出电路和DSP-PC机通信电路等。核心微处理器采用美国TI公司的16位定点DSP芯片TMS320LF2407A。一个运动控制器用以生成轨迹点(期望输出)和闭合位置的反馈环。许多控制器也可以在内部闭合一个速度环。 一个驱动或放大器用以将来自运动控制器的控制信号(通常是速度或扭矩信号)转换为更高功率的电流或电压信号。更为先进的智能化驱动可以自身闭合位置环和速度环,以获得更精确的控制。 一个执行器如液压泵、气缸、线性执行机或电机用以输出运动。 一个反馈传感器如光电编码器,旋转变压器或霍尔效应设备等用以反馈执行器的位置到位置控制器,以实现和位置控制环的闭合。 众多机械部件用以将执行器的运动形式转换为期望的运动形式,它包括齿轮箱、轴、滚珠丝杠、齿形带、联轴器以及线性和旋转轴承。 通常,一个运动控制系统的功能包括:速度控制 点位控制(点到点)。有很多方法可以计算出一个运动轨迹,它们通常基于一个运动的速度曲线如三角速度曲线,梯形速度曲线或者S型速度曲线。 电子齿轮(或电子凸轮)。也就是从动轴的位置在机械上跟随一个主动轴的位置变化。一个简单的例子是,一个系统包含两个转盘,它们按照一个给定的相对角度关系转动。电子凸轮较之电子齿轮更复杂一些,它使得主动轴和从动轴之间的随动关系曲线是一个函数。这个曲线可以是非线性的,但必须是一个函数关系。
1.2 系统的工作原理
本系统由上位机通过双端口RAM把运动控制指令或控制参数传递给运动控制器的DSP,DSP根据采集到的PC机指令,通过位置控制和速度控制算法进行计算。然后将计算出的脉冲信号经脉冲驱动送电机驱动。
2 系统的硬件电路描述
系统硬件电路主要包括电源转换模块、DSP及外围电路、扩展存储器电路、脉冲输出电路、编码器信号采集和处理电路、D/A输出电路和DSP-PC机通信电路等。控制器板卡使用Altera公司的可编程逻辑器件MAXⅡEPM570实现数字逻辑电路设计,降低了板卡的设计尺寸,增加了板卡的可靠性和设计灵活性,它的在线编程特性可使得数字逻辑设计、硬件设计,如同软件设计一样简便。
2.1 电源转换模块
TMS320LF240A是低功耗芯片,采用3.3 V供电,本设计采用Bay Linear Inc公司生产的电源转换芯片B1117提供。
2.2 DSP接口电路
2.2.1 时钟信号
选择16MHz的有源晶振作为外部时钟信号源,从DSP的XTAL1/CLXIN脚输入,经PLL1和PLL2倍频成32 MHz信号,供DSP使用。因而TMS320LF2407A的速度可达到3 1 ns,管脚XTAL2悬空。同时,16 MHz的有源晶振也是CPLD器件MAXⅡ570的外部时钟信号源。
2.2.2 串行EEPROM接口电路
TMS320LF2407A引导ROM为用户提供两种选择:同步传输通过串行外设接口(SPI)实现;异步传输通过串行通信接口(SCI)来实现。程序代码可以加载到用户指定的位置。为了有效的引导ROM和加载,本设计将MP/MC#引脚拉低,从而使DSP工作于微控制器模式。
2.2.3 扩展RAM电路
TMS320LF2407A有1.5 kB的数据/程序RAM,544 bit双口RAM(DARAM)和2 kB的单口RAM(SARAM),但是考虑到所需的程序存储空间和数据存储空间较大,在DSP外部用一片CY62136V作为外存储器,该芯片是128 kB×16 bit的存储器,其中64 kB作为数据存储器,其余64 kB作为程序存储器空间。
2.2.4 外部I/O信号处理
通过管脚引入的硬件中断,包括轴限位中断和编码器INDEX信号中断。8个限位中断信号通过光耦隔离后接入CPLD,经CPLD相与后接入DSP中断管脚XINT1,同时这些信号与DSP的I/O口相连。当某一轴运动到限位开关处时,就会触发DSP的外部中断信号XINT1,然后DSP就可以判定哪个限位开关已经到位。光耦器件选用Toshiba公司的贴片光耦TLP121,它的平均输入驱动电流为50 mA,平均输出驱动电流为5 mA,可直接驱动TTL电路。
2.3 脉冲输出电路
每一轴的两个信号
- 嵌入式软件设计中查找缺陷的几个技巧(03-06)
- 基于算法的DSP硬件结构分析(04-02)
- Windows CE下驱动程序开发基础(04-10)
- DSP+FPGA在高速高精运动控制器中的应用(05-17)
- 基于USB接口和DSP的飞机防滑刹车测试系统设计(05-19)
- 一种基于DSP平台的快速H.264编码算法的设计(05-19)