基于DSP的稳定平台设计
时间:02-15
来源:互联网
点击:
操作系统第一步执行DSP硬件的初始化工作,包括设置系统的中断向量、初始化数字I/O、串行通信接口SPI、定时器模块等。完成后将开始操作系统的初始化,通过调用OSIint()完成操作系统的配置及数据的初始化。接着通过调用任务创建函数OSTaskCreat()函数,依次创建定时中断、横摇调整和纵摇调整3个任务。调用OSStart()最终启动多任务运行。
各任务优先级设定从高到低依次为:横摇调整、纵摇调整、定时中断,各任务间通过消息邮箱机制来实现各个任务间的同步。开始运行时,通过DSP定时器每50 ms一个周期的定时中断,使得定时中断任务就绪运行,该任务通过消息邮箱机制使得横摇调整及纵摇调整任务处于就绪态,并同时挂起等待下一个定时中断。横摇调整及纵摇调整主要完成的工作有姿态测量、姿态数据处理、自适应PID解算、ePWM模块、横摇驱动和纵摇驱动。横摇调整同纵摇调整相似,最后控制的相应驱动分别为横摇驱动、纵摇驱动。其中纵摇调整任务流程如图3所示:
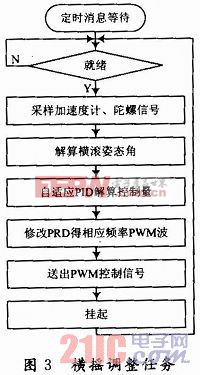
横摇调整及纵摇调整在一个周期内完成相应的平台姿态调整之后,因等待定时中断发送的消息邮箱而挂起,待下一个消息到来之后再一次对平台姿态进行周期性的调整,保持平台在周期范围内的稳定。系统中数据采集与处理的部分关键代码如下所示。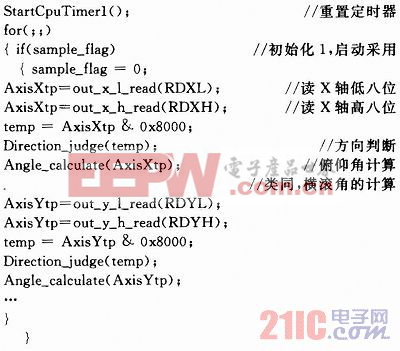
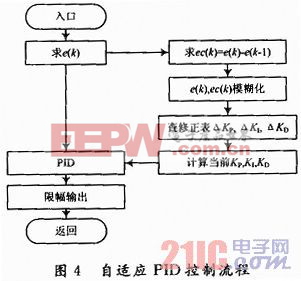
自适应PID控制程序实现流程图如图4所示。
本文通过嵌入式控制系统的搭建,实现了稳定平台隔离海水运动的目的。该稳定平台以DSP TMS320F28335为核心微处理器,使用多传感器测量技术,对两自由度上实行模糊自适应PID控制,并通过架设嵌入式操作系统μC/OS-Ⅱ来管理并行横摇及纵摇任务,通过摇摆台的模拟实验,该稳定平台在稳定性上达到了预期的要求。
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)