基于80C196MC单片机的自动定位系统
1引言
包装机上卷筒型包装纸印有连续的商标,当机器开动时,连续的标纸由送纸辊牵引向机器内输送,再经切纸刀辊将连续标纸分切成单张的包装纸。刀辊每旋转一周,切下一张包装纸,若要使实际切纸线与理论切纸线重合,送纸辊的直径和单张包装纸的长度必须满足严格的数学关系。由于送纸辊加工有公差,包装机工作过程中卷筒的半径逐渐减小,标纸所受张力发生变化等等因素,使得刀辊切下的包装纸和理论切纸线之间有偏差,即使这种偏差很小。例如,某张标纸偏差只有01mm,刀辊速度为300r/min,机器运行10min,累计偏差即达300mm。此时,包装纸上的图案就会明显偏离正确位置,不符合工艺要求。然而,随着经济的发展和人们审美情趣的提高,人们对商品的包装效果提出了更高的要求。为解决这一问题,必须在包装机上设计商标自动定位系统。
2自动定位系统调节原理
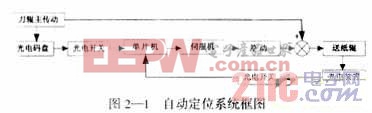
本系统设计为单片机控制的交流伺服系统,因为交流伺服电机与直流伺服电机相比,具有体积小、过载能力强、输出转矩大、不存在电刷磨损、无需经常维修等优点。而且由于无电刷压降因素影响,因此可以达到很低转速,并且有硬的机械特性。定位系统框图如图2—1所示,其调节原理为:在送纸辊上,光电装置利用印在卷筒包装纸上的色标,即可检测标纸的输送位置;与刀辊旋转同步的光电码盘通过光电装置,可以反映刀辊的切纸时间;上述光电装置产生的光电脉冲均送入单片机进行逻辑处理,然后决定伺服电机的旋转方向。伺服电机的运行时间由单片机的定时器中断控制,以伺服电机的输出作为补偿量,它通过差动轮系与主动轮系相合成,带动送纸辊,从而补偿刀辊实际切线与理论切线的偏差,实现标纸的自动定位。
3自动定位系统的硬件结构
经过比较,选用Intel公司的80C196MC作为系统的CPU。其性能优越,功能强大,专为电机控制而设计,特别适用于与轴式光电码盘和伺服电机接口。而且,与MCS—51相比,不仅在主频和90°相移记数方式方面有很大的优势,同时其片内还增加了波形发生器和大量的存储空间。考虑80C196MC 片内有这样丰富的硬件资源,本系统由80C196MC单片机组成最简单、最基本的单片机系统,如图3—1所示。这样,可以大大简化许多外部硬件和控制软件,达到优化系统的目的。
3.1存储空间的确定
80C196MC片内存储器容量可达65536Bytes,除了0000H~01FFH、1F00H~1FFFH和2000H~207FH 3个专用区及标明“保留”的个别单元共896 Bytes外,其余都可作为程序存储区、数据存储区或存储器影射的外设区,共计64642 Bytes,约计64KB可用。因此,不需片外扩展数据存储器和程序存储器。
3.280C196MC的前向通道设计
单片机80C196MC的前向通道配置由光电开关、脉冲整形电路、光耦电路和缓冲电路组成。光电开关采用机电部电气传动研究所研制的最新产品,光源进行脉冲调制,GaAs红外发光二极管,对外界杂乱光和电气噪声的抗干扰能力强。光电开关1LS和2LS检测码盘的旋转位置,亦反映刀辊的旋转位置,光电脉冲信号分别送入P1.0和P1.1脚,供逻辑处理用。光电开关3LS检测卷筒包装纸输送位置,EXTINT为外部中断输入端,光电脉冲信号送入计数脉冲输入端T1CLK,实现包装机的自动计数。
复位采用一种简单而又实用的上电及手动复位电路,低电平有效,由脚引入。
3.380C196MC的后向通道设计
80C196MC的后向通道由缓冲电路、光耦电路、达林顿功放电路及固态继电器等组成。由PWM0(P6.6)和PWM1(P6.7) 输出定时和逻辑处理程序运行结果,因PWM模块本身包含脉冲宽度调制计数器和内部时钟,所以不必另增硬件,控制伺服电机运行的时间。输出信号经固态继电器 1SSR和2SSR控制伺服电机正、反转。固态继电器具有无机械噪声、无抖动、开关速度快、寿命长等优点,适合伺服电机正、反转频繁起动。
3.4系统显示和键盘电路设计
因80C196MC单片机本身的双向I/O端口已经够用,故不须另扩展并行I/O接口,可直接由P3和P4口建立显示和键盘电路,设置6位LED共阴极显示器,段选码由P3提供,位选码由P4口提供。键盘与显示电路合并,列输入依次由P4.1~P4.6提供,行输出由P4.0提供,共设置6个功能键:启动、停止、增加定时时间、减少定时时间、显示定时时间、显示包装数量。
3.5系统报警和停车电路设计
由P2.1输出逻辑处理程序运行结果,再经缓冲器、光耦和达林顿电路控制中间继电器KA,从而实现蜂鸣器报警和包装机自动停车。
4自动定位系统的软件设计
在主传动轴上装有光电码盘,如图4—1a所示,采用2圈光栏,可同时确定位置和方向,分别控制两个光电开关1LS和2LS,码盘
定位 系统 自动 单片机 80C196MC 基于 相关文章:
- 基于GPSOne技术的个人定位终端(07-30)
- 基于C8051的大灯仪自动定位系统(09-21)
- ARM-Linux平台下GPS信号的采集与处理研究(07-25)
- 基于TMS320C6711B DSP的中心定位算法设计 (09-30)
- 基于TMS320C6711中心定位实时图像处理设计(01-08)
- 磁浮列车模型定位系统的设计(07-27)