单片机中最小二乘方滤波器的向量测量和功率计算
目前,以单片机为基础的数字式电气测量、保护装置已成为主流形式。交流信号直接采样也已成为一种普通的方法。快速傅立叶算法是其中的主要算法,而最小二乘方算法,计算量很大,特别是在单片机的处理能力有限的情况下,既要保证实时性,又要保证计算速度,不经过精心设计和程序优化,很难保证二者的统一。
通过减少采样次数、使用每周滤四个采样点拟合的滤波器和一套优化措施,使该算法计算速度大大提高,可以胜任工频向量的实时测量,因而可以用于过流、速断、方向保护等多个方面。本文分析了滤波器中的向量相位关系,同时给出了以此为基础的两线制功率计算举例。该方法已通过实际应用检验。
1 最小二乘方滤波器的构造
根据文献[1~3]的研究结果,对每一路信号,输入电压函数可表示为:
P0——直流分量值
Pk——第K次谐波分量的幅值 K=1,…,N
θk——第K次谐波的相对起始相角 K=1,…,N
ω——基波角频率,ω=2πf,f=50Hz
λ——常数,等于直流分量衰减时间常数
在一般测量、保护应用中,只关心基波成分。为减少计算量,应最大限度地减少采样次数。根据采样定理,一个正弦函数的离散采样次数量少每周波3次。为方便起见,将每周波采样次数定为4次,即采样周期为5ms。则公式(1)中只能包含直流和工频分量。将直流分量按泰勒级数展开并取其前两项,则(1)式成为:
u(t)=P0-P0λt+P1sin(ωt)cos(θ1)+P1cos(ωt)sin(θ1) (2)
其中,P0为直流分量值,P1为基波峰-峰值,θ1为基波分量在采样时刻相对于零点的相位角。
若以最近连续4次采样值为样本,可得到4个采样方程。如将P0、-P0λ、P1cos(θ1)P1sin(θ1)作为待测未知数,可将4个采样方程表示成如下矩阵: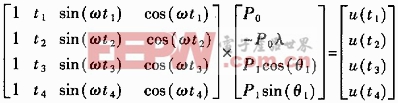
X=A -1U (3)
其中A-1表示A的逆矩阵,亦即向量X的最小二乘方滤波器。根据文献[3],这个滤波器为: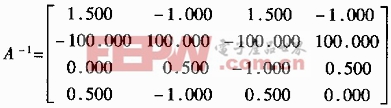
P1cos(θ1)=∑A-1[3][I]U[I] I=1,4 (4)
P1sin(θ1)=∑A-1[4][I]U[I] I=1,4 (5)
cos(θ1)=P1cos(θ1)/P1 (6)
sin(θ1)=P1sin(θ1)/P1 (7)
P0=∑A-1[1][I]U[I] I=1,4 (8)
P0λ=∑A-1[2][I]U[I] I=1,4 (9)
上述相量的相位关系是相量进一步运算的基础。
3 两线制功率计算
目前,高压线路的功率测量一般采用三相电压和两组电流,即两线制功率表方法。用式(4)、(5)、(6)、(7)和(10)可以实现线路有功功率和无功功率测量,具体过程如下:
两线制的前掉是假设三相电流平衡,即:
ia+ib+ic=0 (11)
如果无B相电流互感器,则B相电流:
ib=-(ia+ic) (12)
线路有功功率为:
P=Pa+Pb+Pc=ua×ia+ub×ib+uc×ic
=ua×ia-ub×(ia+ic)+uc×ic
=uab×ia+ucb×ic
=Uab×Ia×cos(θuab-θia)+Ucb×Ic×cos(θucb-θic) (13)
根据三角函数公式:
cos(θuab-θia)=con(θuab)×cos(θia)+sin(θuab)×sin(θia) (14)
cos(θucb-θic)=cos(θucb)×cos(θic)+sin(θucb)×sin(θic) (15)
其中,uab为A相和B相之间的线电压;ucb为C相和B相之间的线电压。
将(6)和(7)式结果带和(14)、(15)和(13)式,即测得三相平衡线路的有功功率。
如果输入电压是相电压,则:
P=Pa+Pb+Pc=ua×ia+ub×ib+uc×ic
=ua×ia-ub×(ia+ic)+uc×ic
=Ua×Ia×cos(θua-θia)-Ub×Ia×cos(θub-θia)
-Ub×Ic×cos(θub-θic)+Uc×Ic×cos(θuc-θic) (16)
将上式中的余弦函数展开后,再钭(6)和(7)式的对应结果分别代入即可。
无功功率的计算只需将(14)、(15)和(16)式中的余弦运算改为相应的正弦运算即可。
4 基于单片机应用的优化措施
从目前市场情况来看,虽然单片机性能在不断提高,如INTEL单片机从8位、16位到32位不断推陈出新,但真正得以广泛采用的并不是性能最好的产品。从实际应用来看,有时必须面对一个受限制的客观现实。就本应用来说,采用以下措施可大大提高程序的计算速度。
4.1 变浮点运算为整数运算
对于(4)~(10)式来说,采用C或PL/M高级语言进行浮点运算既方便,精度又高。但与整数运算相比,浮点运算速度要慢得多。因此,为提高计算速度,应尽量采用整数运算。从工程实际来看,A/D转换后的结果一般是双字节整数,可与放大10位的最小二乘滤波器直接运算,则(4)式变为:
X[3]=5×U[2]-10×U[3]+5×U[4] (17)
(5) 式变为:
X[4]=5×U[1]-10×U[2]+5×U[3] (18)
(17)、(18)式只有6次4字节的长整数乘法和4次加法。即使对12位A/D而言,(17)、(18)式的计算结果也不会溢出。由于滤波器扩大10倍时是整数,没有四舍五入,因此计算过程无任何附加误差。
4.2 快速求平方根法
从(4)~
- 用CPLD实现FIR数字滤波器的设计(08-07)
- 用8位微处理器实现数字低通滤波器设计(05-15)
- 基于LabVIEW的DSP设计(04-10)
- DSP滤波器用于扩展数字化仪器的性能(01-25)
- 基于DSP的并联电力有源滤波器的仿真研究(02-08)
- 基于DSP的滞环跟踪型有源电力滤波器数字控制系统(02-21)