一种基于80C196KC的电子软起动器的软硬件实现
全数字电子软起动器不仅能有效控制鼠笼式三相异步电动机起动电流,减缓电流对电动机和电网的冲击,还能在起动和运行过程检测电流、电压参数,对异常情况进行处理、显示及报警,实现对电动机的综合保护。
三相鼠笼式异步电动机以其结构简单、性价比高和工作特性好等诸多优点,在当今工业应用的各个领域都有广泛的应用,但它有一明显缺点,就是起动电流过大(一般起动电流为额定电流的5~7倍甚至更大),这样不论是对电动机本身,还是对电网以及其他电气设备,都会产生不利的影响。
电子软起动器的诞生,已经从很大程度上提供了解决这个技术难题的有效手段,而且近年来随着电力电子技术以及智能控制技术的不断发展,电子软起动器已经逐步取代了传统的起动方法,例如“Y-△”降压起动、自耦变压器降压起动以及磁性调压起动等。所谓电子软起动器,就是使用晶闸管调压技术,采用单片机控制的起动器,在用户规定的起动时间内自动地将起动电压连续平滑地上升,直到达到额定电压,从而达到有效控制起动电流的目的。
基本工作原理
软起动器的控制原理图如图1所示,它采用三相平衡调压式主回路,将3对反向并联的大功率晶闸管串接于电动机的三相电路上,通过控制其触发角的大小来改变晶闸管的导通程度,由此控制电动机输入电压的大小,以达到实现电动机软起动的过程。当电动机起动完成并达到额定电压时,闭合三相旁路接触器KC,短接晶闸管,使电动机直接投入电网运行,以避免晶闸管元件的持续损耗。其中,主回路的晶闸管和接触器随系统容量不同可以选用不同的器件。
从图1可以看出,主回路主要是晶闸管电子调压装置,由6个晶闸管V1~V6组成,另外,利用3个霍尔传感器来完成三相定子的电流检测。在起动过程中,晶闸管V1~V6的触发角由软件控制,从而使加在交流电动机三相定子绕组上的电压由零逐渐平滑地升至全电压。同时,电流检测装置检测三相定子电流送给单片机进行运算和判断,当起动电流超过设定值时,软件控制升压停止,直到起动电流下降到低于设定值之后,再使电动机继续升压起动。若三相起动电流不平衡并超过规定的范围,则停止起动。另外,由电动机理论可知,当电动机的输入电源频率不变时,电动机的输出转矩与输入电压的平方成正比。因此,软起动不仅使电动机定子电压连续平滑地增加,实现了升压限流起动,而且避免了电动机起动转矩的冲击和不平稳的现象。
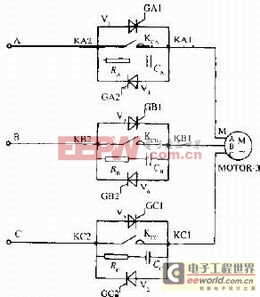
图1 软起动器主回路示意图
软起动的控制器采用16位的Intel 80C196KC芯片,这种芯片比一般的8位单片机有更高的运算速度和较高的集成度,而对比DSP芯片来讲,虽然运算速度上稍微慢了点,但196芯片价格便宜这个特点又使其在性价比上占了一定优势,而且196芯片的CPU晶振频率现在也已达到了16MHz,再加上它自身具有乘除法运算指令,使其已经能够满足软起动过程中数据运算处理速度要求。另外,80C196KC芯片丰富的外围部件功能,以及具有10位A/D高分辨率转换的特点,可以在保证软起动器高可靠性的同时降低生产成本。
硬件设计
一个完整的软起动器一般由两部分组成,即控制单元和功率单元。控制单元是核心部分,软起动器大部分功能都是在这一单元实现的,其中含有三相电源的电压及工作电流的检测、键盘输入和液晶显示输出信号的接收和处理,实现远程通信和故障诊断及报警等;功率单元则担负着形成所需触发脉冲的职责。整个系统结构如图2 所示,下文也将从系统核心部分——触发控制部分重点说明软起动器的硬件设计。
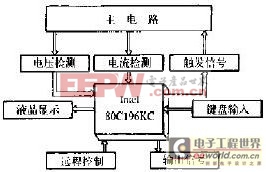
图2 软起动器总体系统结构图
电压同步信号检测电路
采用如图3所示的电路作为电压同步信号检测电路。从图中可以看出,这个电路的功能就是将由电源侧来的线电压正弦信号转为低压方波信号以供单片机进行处理分析。由于这里的信号是从高压转为低压送入单片机处理的,因此要利用一块光耦P521对高低压信号进行隔离,这样保证了这两种信号可以互不干扰地分离处理。整个工作过程大致是这样的:由电源侧来的线电压信号经过2个电阻和1个二极管,变成半波交流信号,这个交流信号在正半波时触发光耦导通,从而使得右侧输入到单片机的是高电平信号;而当光耦左侧交流信号处于低电平时,光耦则截止,那么右侧输入到单片机的信号也就是低电平。这样周而复始,单片机所得到的就是幅值为5V(VCC=5V)的方波信号,周期等同于电源的周期即工频50Hz,而高低电平持续的时间也基本与电源侧正负交流信号所持续的时间大致相同,虽然其间存在着一定的时延,但可以通过软件进行补偿,从而既简化了外围硬件电路的设计,又得到了与电
- 基于80C196KC的ARINC429总线接口板设计(10-24)
- 基于三相可控硅的半控桥数字触发器设计(08-18)
- 基于80C196KC与PSD4235G2在线编程的实现(03-28)
- 80C196KC-ADMC401双CPU接口电路设计/其应用(03-23)
- 基于80C196KC与PSD4235G2在线编程的实现 ((03-13)
- 基于微控制器的晶闸管整流装置数字控制器的设计(02-17)