一种基于80C196KC的电子软起动器的软硬件实现
源电压同步的信号,为下面给出晶闸管触发信号提供了工作电压零点的基准。
这个电路的优点就在于:一方面,在起动未开始或是开始瞬间,线路还没有负载电流时,这个电路仍可以检测到器件电压零点,这就比电流过零同步方式要优越得多;另外,由于输入的交流信号是直接从电源侧获取的,因此这就不需要像其他电路那样需要先利用变压器取得交流信号再进行处理,这样就既节省了线路板的空间,也节约了成本。
同时,可以利用图3这个电路(以下称为电路I)和另一套与电路I基本相同的电路(以下称为电路II)配合,进行电源的相序判断和缺相检测。在这里也大致介绍一下工作原理。电路II和电路I结构基本相同,存在的区别就是,假设电路I的输入侧U_1和U_2分别连接电源的A、B两相,而电路II输入侧U_1' 和U_2'连接的就是电源的B、C两相,且输出信号是送到80C196KC芯片的另一个HSI(高速输入引脚)口的。这里利用到芯片HSI引脚,它特有的功能,一是这种引脚能够无需CPU干涉而快速响应事件,二是这种引脚不但可以设置事件发生产生中断,还可以记录事件发生时的时间和当时引脚的状态。这里我们假设电路I的U_1和U_2接的是电源的A、B相,而电路II的U_1'和U_2'接的是B、C相,这样在三相电源正常工作时,当AB线电压发生正跳变 (即从负半波转为正半波)时,BC线电压为负,那么电路II送入CPU的信号就为低电平;当AB线电压发生负跳变时,BC线电压为正,那么电路II送入 CPU的信号是高电平(如果电路II的U_1'和U_2'接的是C、B相,那么两次送入CPU的信号高低电平情况就相反)。
而当电源发生缺相故障时,AB线电压无论发生何种跳变时,BC线电压都同为正或同为负,这样电路II送入CPU的信号将同为高电平或低电平。设置电路I接入CPU的HSI0引脚在信号每次跳变时都产生中断,并在每次跳变中断时记录下电路II接入CPU的HSI1引脚的状态,通过两次对比HSI1引脚的电平情况,从而判断出所连入电路中三相电源的相序,为下一步产生正确的脉冲触发信号序列奠定基础。同时在电源缺相时,也能判断出故障状况,并封锁脉冲信号及给出报警信号和显示信息。
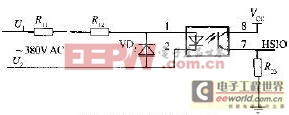
图3 电压同步信号检测电路
触发脉冲形成电路
软起动器的工作原理就是通过改变主回路中晶闸管的导通时间,从而调整电动机的起动电压来实现的,那么如何按照要求形成所需的触发脉冲信号就显得尤为重要。晶闸管的触发方式有很多种,在这个设计采用脉冲变压器来产生符合要求的具有一定规律的脉冲,主要为的就是使触发发生电路在同晶闸管相连接的同时,又可以使这两部分电路之间具有电气隔离。下面以单相触发脉冲形成电路为例,具体说明是如何利用这个电路形成所需的六路触发脉冲信号的。
如图4所示,电路中74LS02的2、3脚分别接Intel196KC芯片的PWM脚和HSO脚,而脉冲变压器二次侧输出端GA1、KA1和GA2、 KA2分别接的是某一相正反1对晶闸管的触发极和阴极。这样根据电路可分析得,由于PWM引脚是由软件设置在不断地产生一定占空比的脉冲信号,因此如果想在某一时刻触发该相的晶闸管,只要在这个时刻通过软件设置将连接到该电路的HSO引脚置为低电平,并保持一定宽度时间就可以实现,而究竟是正向晶闸管还是反向晶闸管导通,那就取决于外部施加在该相晶闸管两端的电源正负了。同理,如果想不输出触发脉冲,只要将该HSO引脚置为高电平就可以了。同时,还可利用 HSO引脚同时通过软件设置电平变化的特点,在软起动过程中如有检测到故障信号需停止软起动操作,就只要两条指令便可以令HSO引脚迅速置为高电平,即同步立即 封锁三相触发脉冲信号,做到及时反应外部故障。
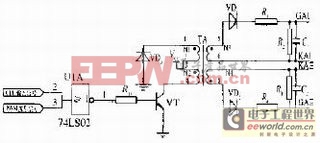
图4 单相触发脉冲形成电路示意图
另外,电路中晶闸管控制用的脉冲变压器采用1∶1∶1三线圈型,这样在减少变压器个数的同时,也可以将原先可能需要的6根输出信号控制线减少至3根。同时在脉冲变压器二次侧串联1个电阻,这样既可以用来降低晶闸管的维持电流,还可在这种接有2个晶闸管的三线圈变压器的场合中用来平衡控制极电流,同时这个加接电阻还能够在存在高噪声电平的场合防止误触发。此外,在此电阻旁还串联1个二极管,这是为了在脉冲变压器输出电压瞬变或反向时防止反向控制极电流,并且二极管同样也可以降低晶闸管的维持电流。至于在接到晶闸管控制极和阴极两端的输出端并联1个RC回路,那则是为了在这种控制三相异步电动机感性负载情况下使晶闸管正确换流。
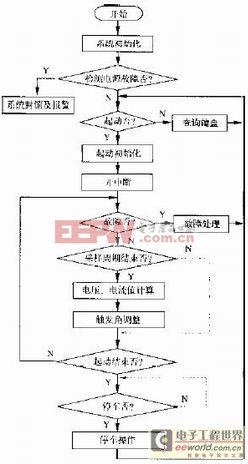
图5 斜坡电压起动方式程序流程图
软起动器整体软件设计主要分为主程序、起动程序以及中断服务程序等几个部分,主程序是完成各种参数的输入、设定以及电压、电流的检
- 基于80C196KC的ARINC429总线接口板设计(10-24)
- 基于三相可控硅的半控桥数字触发器设计(08-18)
- 基于80C196KC与PSD4235G2在线编程的实现(03-28)
- 80C196KC-ADMC401双CPU接口电路设计/其应用(03-23)
- 基于80C196KC与PSD4235G2在线编程的实现 ((03-13)
- 基于微控制器的晶闸管整流装置数字控制器的设计(02-17)