基于MSP430的倒车雷达的设计
时间:04-21
来源:互联网
点击:
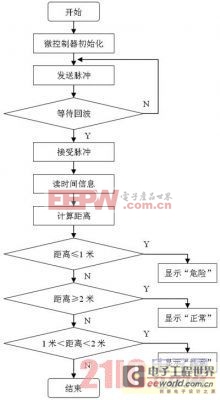
图8 系统软件流程图 超声波发射电发出超声波的同时计数器起头计数,当碰到障碍物反馈旌旗灯号到超声波领受器领受,经CX20106领受电处置后,发生一个低脉冲,该旌旗灯号传送给单片机发生间断,挪用测距子法式,计较出测量距离,挪用显示子法式,按照分歧的测量数值在液晶上显示距离和报警。当距离大于2m,显示“平安”和测量距离,继续测量;当距离小于1m时,显示“”和测量距离,由P1.2位驱动蜂鸣器报警;当距离小于2m且大于1m时,显示“注重”和测量距离。为加强抗干扰能力,系统持续发射超声波测量三次,从中剔除最大最小值,取中心值计较出切确的距离。如许每秒可测约三个数据,仍然可以知足及时性要求。
结语
该倒车雷达采用了高机能的MSP430F2274单片机,并充实操纵了其片上资本使得系统功能丰硕,利用的外围芯片削减,系统靠得住性获得提高。该倒车雷达应用于汽车中,当驾驶员倒车时,从液晶显示屏上一目了然便知道障碍物离车的距离,降服了后视镜小,视野窄的错误谬误,消弭了倒车造成的变乱隐患。
- μC/OS-Ⅱ在MSP430F149上的移植(03-01)
- MSP430与I2C总线接口技术的研究(06-14)
- 基于MSP430单片机的超声波倒车雷达监测报警系统设计(08-14)
- 2010年中国(成都)电子展胜利闭幕(08-15)
- 基于MSP430单片机的电子汽车限速器的研究(08-20)
- 基于MSP430的微功耗数据采集系统的开发应用(10-16)