基于MSP430的倒车雷达的设计
随着人们对汽车辅助驾驶系统智能化要求的提高和汽车电子系统的网络化发展,新型的倒车雷达应能够连续测距并显示障碍物距离,并具有通信功能,能够把数据发送到汽车总线上去。
以往的倒车雷达设计使用的元器件较多,功能也较简单。本文介绍的基于新型高性能超低功耗单片机MSP430F2274的倒车雷达可以弥补以往产品的不足。
系统总体设计
系统采用超声波测距原理。超声波测距仪器一般由发射器、接收器和信号处理器三部分组成。工作时,超声波发射器发出超声波脉冲,超声波接收器接收遇到障碍物反射回来的反射波,准确测量超声波从发射到遇到障碍物反射返回的时间,根据超声波的传播速度,可以计算出障碍物距离。作为一种非接触式的检测方式,超声波具有空气传播衰减小、反射能力和穿透性强的特点。超声波测距具有在近距离范围内有不受光线和雨雪雾的影响、结构简单、制作方便和成本低等优点。高性能的单片机结合超声波测距,可以实现功能强大、使用方便的倒车雷达。TI公司的16位单片机MSP430F2274功耗极低,片上资源丰富,同时利用JTAG接口技术,可以对片上闪存方便的编程,便于软件的升级,非常适合作为倒车雷达系统的微控制器。倒车雷达系统的框图如图1所示。
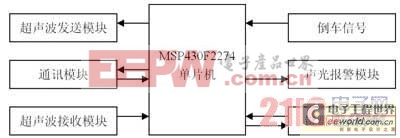
图1 倒车雷达系统框图
硬件系统设计
系统以MSP430F2274微控制器为核心,外围电路由超声波发射电路、超声波接收电路、声光报警电路、通信接口电路、键盘液晶显示电路五部分组成,下面逐一介绍。
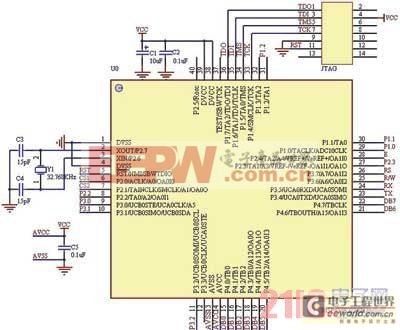
图2 倒车雷达系统主控电路图
系统的主控电路图如图2所示。本系统中选用的MSP430F2274片内有32Kb闪存和1Kb RAM,因此无须外扩存储器。外接的32.768kHz晶振作为CPU关闭状态Basic-Timer的时钟源,同时也作为系统的车载时钟使用。
图3 倒车雷达超声波发送模块
超声波发送模块电如图3所示,由超声波发生和发射两部门构成。超声波的发生方式有两种:硬件发生法和软件发生法。常用的硬件发生法常采用如下方案:超声波由CD4011组成的振荡器振荡发生,经升压变换鞭策超声波换能器而发射出去,振荡器的起振和停振由单片机来节制。本设计采用软件发生法,因为经由过程软件发生法既可以削减硬件的复杂水平,降低系统的成本,又具有矫捷性强、轻易实现、不变性好的长处。本系统操纵MSP430F2274单片机的按时器功能来发生不变的PWM(40Hz)脉冲波,并经由过程I/O端口P2.3输出到超声波发射部门。在超声波发射电中CD4049一共包罗了6个非门,图3中线仅利用了3个,为了防止干扰或被静电击穿导致整个CD4049损坏,把没有利用的那一侧的3个非门串起来做接地处置。当节制端输出一系列固定频率脉冲时,在压电陶瓷型超声波发射换能器UCM-40-T上就固定频率的加正电压和反电压,发出大功率的超声波,大学生创业优惠政策所获得的波形比其他体例结果更抱负。
图4 倒车雷达超声波接收模块
放大器CX20106,它由前置放大器、限幅放大器、带通滤波器、检波器、积分器、整型电构成。此中前置放大器具有主动增益节制功能,可以在超声波传感器领受较远反射旌旗灯号输出微弱电压时放大器有较高的增益,在近距离输入旌旗灯号强时放大器不会过载。调节芯片引脚5的外接电阻R3,将它的滤波器的中间频率设置在40kHz,达到了很好的结果。当领受到与滤波器中间频率相符的旌旗灯号时,其输出引脚7输出一个低电平,而输出引脚7直接接到MSP430F2274的P2.2上,以触发间断。
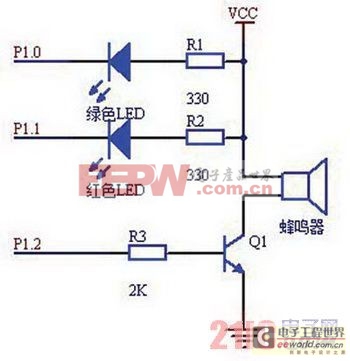
图5 倒车雷达声光报警电路图
报警模块采用简单的声光报警电路,如图5所示。先设定一个临界值,当车尾与障碍物的距离小于设定的最小距离时,红色指示灯闪亮,绿色指示灯熄灭。单片机向其端口发出PWM脉冲,随着距离的减小,通过控制PWM脉冲的占空比使闪光和蜂鸣的频率加剧,以此来提示驾驶员。
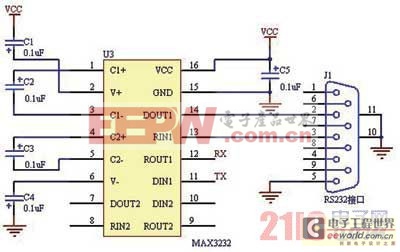
图6 倒车雷达通信接口电路图
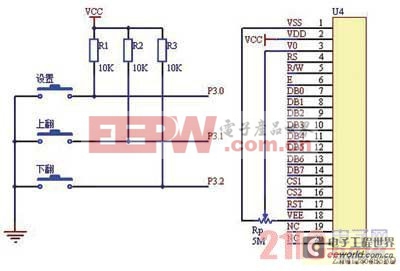
图7 倒车雷达键盘显示电路图
键盘和显示电路如图7所示,由键盘和液晶显示两部分组成。其中键盘采用独立式按键,有3个按键,一个设置键、一个上翻键、一个下翻键。可以进行报警值、工作方式、时钟等各个参数的设置。液晶显示电路采用ZJM12864BSBD这款低功耗的点阵图形式LCD,显示格式为128点(列)×64点(行),具有多功能指令,容易使用,可实时的显示时钟、距离和报警提示信息,方便直观。
系统软件设计
软件采用模块化设计,法式由主法式、测距子法式和键盘显示子法式、时钟显示子法式等多个模块构成,调试过程中对此中每个功能模块和子法式一一调试大学生创业政策,在每个子法式都完成指定的功能后大学生创业基金宁波大学4支创业团队获甬商大学生创投基金投资,再进行综合调试。系统的软件流程如图8所示。
- μC/OS-Ⅱ在MSP430F149上的移植(03-01)
- MSP430与I2C总线接口技术的研究(06-14)
- 基于MSP430单片机的超声波倒车雷达监测报警系统设计(08-14)
- 2010年中国(成都)电子展胜利闭幕(08-15)
- 基于MSP430单片机的电子汽车限速器的研究(08-20)
- 基于MSP430的微功耗数据采集系统的开发应用(10-16)