恒力矩步进电机驱动器分析设计
0 引言
得益于电子技术突飞猛进的发展,单片机、驱动芯片很多,国内许多厂家制作的步进电机驱动器性能很好,但是客户对驱动器基本要求是一样的:性价比高、控制简单、安全可靠等。笔者设计了一种基于L298+L297的恒流斩波两相步进驱动器,该驱动器本身带有脉冲信号源方便用户进行一些简单控制,设置和使用。在整、半步控制时,能维持恒力矩输出,比市场上同类产品性能更优越。而且驱动器斩波电流较大,恒转矩输出,工作可靠,内建有脉冲信号源方便用户进行一些简单控制,设置和使用非常方便。
1 L297功能分析
L297芯片采用模拟/数字电路兼容的I2L工艺,20脚DIP封装,通常以5V供电,全部信号TTL/CMOS兼容,是非常适用于两相步进电机控制的专用芯片。L297的内部逻辑框图如图1,其核心电路是变换器。
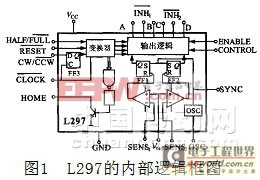
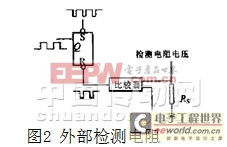
由变换器产生4个输出信号送给后面的输出逻辑部分,输出逻辑提供禁止和斩波器功能所需的相序。为了获得电机良好的速度和转矩特性,相序信号是通过2个PWM斩波器控制,斩波器包含有一个比较器、一个触发器和一个外部检测电阻如图2,晶片内部的通用振荡器提供斩波频率脉冲,振荡器输出的振荡脉冲频率f由OSC的外接RC决定频率=1/0.69RC。每个斩波器的触发器由振荡器的脉冲调节,当负载电流提高时检测电阻上的电压相对提高,当电压达到Vref时(Vref是根据峰值负载电流而定的),将触发器重置,切断输出,直至第二个振荡脉冲到来、此线路的输出(即触发器Q输出)是一恒定速率的PWM信号,L297的CONTROL端的输入决定斩波器对相位线A,B,C,D或抑制线INH1和INH2起作用。CONTROL为高电平时,对A,B,C,D有抑制作用;为低电平时,则对抑制线INH1和INH2有抑制作用,从而可对电机转矩进行控制。
2 L298功能分析
L298芯片是一种高电压、大电流双H桥功率集成电路,可用来驱动继电器、线圈、直流电机和步进电机等感性负载。它具有两个抑制输入来使器件不受输入信号影响。每桥的三极管的射级是连接在一起的,相应的外接线端可用来连接外设反馈电阻。可安置另一输入电源,使逻辑能在低电压下工作。L298的内部逻辑框图如图3。
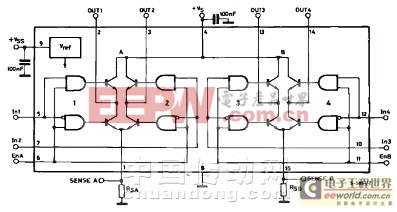
图3 L298的内部逻辑框图
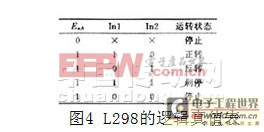
L298的逻辑真值表如图4,当EnA为低电平时,IN1、IN2输入电平被抑制,桥路断开,电机停止。当EnA为高电平,IN1、IN2输入电平为一高一低,电机正或反转;IN1、IN2同为低电平或高电平,桥路断开,电机停止。
3 步进电机的驱动特性
两相步进电机的线圈绕组分为+A/-A相和+B/-B相,忽略电磁转矩与电流之间的非线性因素,要使电机平稳匀速、恒力矩转动,关键是控制电机绕组中的电流,如图5所示。
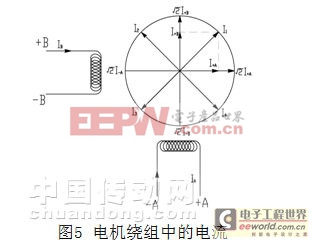
在基本步单相激励驱动方式下,相绕组电流将按 I+A→I+B→I-A→I-B 4拍进行循环;在基本步两相激励驱动方式下,相绕组电流将按I+A 、I+B→I+B、I-A→I-A、I-B→I-B 、I+A 4拍进行循环,即整步驱动方式的电流矢量把一个圆平均分割成四份;在半步单、两相交替激励驱动方式下,相绕组电流将按,I+A→I+A 、I+B→I+B→I+B、I-A→I-A→I-A、I-B→I-B→I-B 、I+A 8拍进行循环,即半步驱动方式的电流矢量则可以把一个圆分割成8份。两相激励方式下产生的步进电流将是各相的合成电流矢量,分别为,I1、I2、I3、I4,其幅值是单相电流值的![]() 倍。因此,在半步单、两相激励驱动方式下,为了保持力矩恒定,在电流由双相转换为单相时,如I-B 、I+A→I+A,则+A-A相绕组的电流必须提高到双相电流I+A的
倍。因此,在半步单、两相激励驱动方式下,为了保持力矩恒定,在电流由双相转换为单相时,如I-B 、I+A→I+A,则+A-A相绕组的电流必须提高到双相电流I+A的![]() 倍,半步恒力矩运行电流随时间的变化如图6。
倍,半步恒力矩运行电流随时间的变化如图6。

同样,当基本步两相激励驱动方式改变为基本步单相激励驱动方式时,要维持输出力矩的恒定,相电流也必须为双相电流的![]() 倍。由于半步单、两相激励方式步进分辨率提高了一倍、且电机运转会更为平稳,而基本步两相激励方式的相线圈利用率高,能产生较大的力矩,同时会产生电磁阻尼,削弱或消除振荡现象,这两种控制方式较常被采用。
倍。由于半步单、两相激励方式步进分辨率提高了一倍、且电机运转会更为平稳,而基本步两相激励方式的相线圈利用率高,能产生较大的力矩,同时会产生电磁阻尼,削弱或消除振荡现象,这两种控制方式较常被采用。
由于绕组电感的影响,绕组中的电流将按 规律上升。所以为了获得好的高频性能,使绕组中的电流上升波形变陡,可以用高电压驱动的方法来缩短电流上升到参考电流I的时间,能获得较好的牵出力矩并改善电机的启动性能.
规律上升。所以为了获得好的高频性能,使绕组中的电流上升波形变陡,可以用高电压驱动的方法来缩短电流上升到参考电流I的时间,能获得较好的牵出力矩并改善电机的启动性能.
4 电路解决方案
本设计的步进电机控制驱动电路包括电源电路、控制驱动电路、过流检测电路组成。
电源电路,如图7所示。内部5V电源取自LM117,LM117内置有过载保护、安全区保护等多种保护电路,允许的电源电压+24到+40V,LM117前端接的C1、C2、C3用以抵消输入端的电感效应,防止产生自激效应。C5是为了瞬时增减负载电流时不至于引起输出电压有较大的波动。LED是电源指示灯。
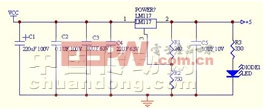
图7 电源电路
控制驱动电路及过流检测
步进驱动 恒力矩 L297 L298 555震荡器 相关文章:
- 嵌入式PLC芯片组实现kp3-05m06r型运动控制器(01-30)
- A4980:汽车可编程步进驱动器(05-09)
- 基于STC89C52的智能印章机的设计方案(01-13)
- 机器人教程3:直流电机驱动及L298N模块(12-01)
- L298N电机驱动电路设计(11-27)
- AVR与L298进行直流电机控制(11-26)