嵌入式PLC芯片组实现kp3-05m06r型运动控制器
1 引言
本文作者利用黄石市科威自控有限公司的嵌入式plc芯片组,设计出了kp3-05m06r型运动控制器。该控制器集plc、can总线、rs485/232等功能于一体,与步进驱动器或伺服驱动器配套使用,具有对步进电机或伺服电机进行点动、定位、脉冲正反插补、脉冲分频等功能。多个运动控制器通过can通信接口互连,其中一台运动控制器作为主站,其余运动控制器均作从站。该系统可接人机界面,实现工艺集中显示、控制和管理,如配备web服务器还可实现控制系统的远程监控和诊断。
2 运动控制器的功能
自2005年至今,kp3-05m06r型运动控制器在纺织、印染行业现场应用了数千台。实践证明该款控制器不但性能优越,而且使用和维护非常简便。其中主要参数如下:
输入:5路光耦+1路最高100khz脉冲信号。
输出:6路继电器+5路晶体管+1路0~10vdc +1路级连脉冲+1路分频脉冲。
通信功能:
can接口,波特率160kbit/s,可实现多个运动控制器互连;
串口0,可完成梯形图下载、监控、接字符屏或人机界面;
串口1,支持三菱fx2n计算机链接方式格式1的部分主从协议,按此协议可实现本运动控
制器与fx2n系列plc、操作终端或其他设备互连,完成信息交换、参数设置、异地操作等功能。
控制功能:
脉冲分频,频率=输入脉冲频率/k,其中4.000≤k∞,小数点后有效数字为3位;
脉冲点动,自动定位,直线插补;
编程语言:
梯型图语言,与三菱fx2n指令兼容。
3 硬件设计方案
3.1 主控制器及外围电路框图
主控制器及外围电路框图如图1所示。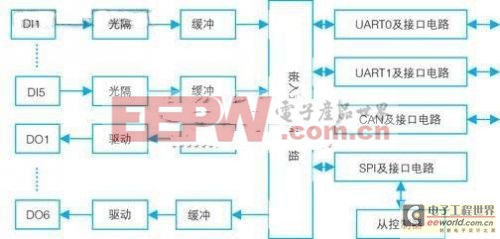
图1 主控制器及外围电路框图
3.2 从控制器及外围电路框图
从控制器及外围电路框图如图2所示。
图2 从控制器及外围电路框图
4 软件设计方案
4.1 主控制器软件设计
主控制器采用嵌入式plc芯片组,完成开关量输入输出、uart0、uart1、can、rs485/232互连和通信功能。基本软件框架由以下七个子程序组成。
init-config:端口初始化程序,完成输入输出端口配置,中间变量初始化,启动spi。
init-start:上电初始化程序,复位所有输出口。
init-set:设置初始化程序,复位所有输出口。
init-run:运行初始化程序。
step:指令周期扫描程序
tms:2.5ms周期扫描程序,采样输入口状态、刷新输出口状态、spi通信报文的发送和接收。
scan:演算周期扫描程序,输入口状态滤波,spi通信报文的解读。
4.2 从控制器软件设计
从控制器采用c8051f330单片机,指令运算速度高达25mips。从控制器对输入脉冲采样,接受主控制器发送的命令并进行相应的处理,输入脉冲经过分频后,输出相应频率的脉冲,并将有关信息发送给主站控制器。从控制器的作用相当于一个执行机构,它接受主控制器的命令执行不同的动作,并把执行的状态反馈给主控制器,主要由以下5个功能程序组成。
start:上电复位初始化程序,输入输出端口配置,复位中间变量单元,启动spi、int0中断。
int-int0:外部中断0服务程序,对输入脉冲进行分频处理及脉冲插补。
int-spi:spi中断服务程序,spi通信报文的接收和发送。
int-t3:定时器t3中断服务程序,监控spi通信状态和主程序执行状态。
main:主程序,解读spi通信报文,完成脉冲点动、定位。
4.3主从控制器的组合设计
主、从控制器之间以spi接口连接,spi通讯速率为500kbit/s,因此有利于提高系统的快速性和实时性。
主站采用定时发送/接收模式,嵌入程序初始化时,启动spi发送,定时时间到,先接收一字节数据,然后发送下一字节数据。当所有报文发送完成后,暂停发送等待主程序处理报文,报文处理完后才启动下一轮发送。
从站采用中断接收/发送模式,进入中断服务程序后,先接收一字节数据,然后发送一字节数据,当所有报文接收完成后,对应的有相同字节的报文发送完成。此时从站停止接收报文,等待主程序处理接收到的报文,报文处理完后,又启动下一轮报文接收过程。
报文结构:stx+报文内容+etx+crc。
stx:报文起始代码,固定为02h。
报文内容:起始2个字节为命令字对应的ascii码,以区别不同的报文,后面为报文实际 数据,全部采用ascii码。
etx:报文结束代码,固定为03h。
crc:校验和,报文内容所有字节相加后再加etx的数值,然后转换成ascii码。
5 应用举例
5.1控制设备名称
控制设备名称:4套色圆网印花机控制系统。
5.2技术要求
同步传动包括两部分:主传动同步主要是进布电机与超喂电机、印花电机、烘房电机、立柱烘焙电机(含立柱烘焙电机与落布电机等单元之间的同步)之间的同步传动;分同步传动则是实现印花电机与网头分电机之间的同步传动,要求同步精度高。
电控系统由主轴运动控制噐(即主站)、从轴控制噐(4合)、人机界
- 基于EASY嵌入式PLC芯片构建现场总线ETS系统(12-02)
- A4980:汽车可编程步进驱动器(05-09)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)