一种多目标串联型短路限流控制器的研究
很多破坏电力系统正常运行的情况是由短路故障引起的。随着电力系统容量的不断增加,电网中的短路电流问题也随之增多,因而限制电力系统短路电流已成为一个急需解决的问题。由于电力电子技术及大容量电力电子器件的快速发展,电力电子短路限流器(FCL)是限制短路电流一个较有效手段。它具有动作速度快、允许动作次数多、控制方便等优点,具有很好的应用前景。
这里将短路限流控制装置和限流电抗器串联后接在电源和负载之间,在系统正常运行时,换流器用于补偿限流电抗器产生的电压降,并抑制电抗器和负载产生的谐波,同时可消除电压暂升、电压暂降及三相不平衡等问题,当系统发生短路时将控制装置切出,此时限流电抗器起到了限制短路电流的作用。
2 原理与设计
2.1 主电路拓扑
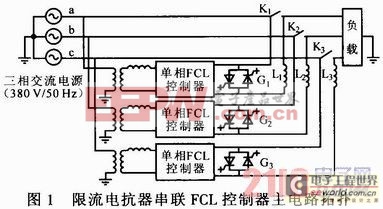
图1为限流电抗器串联FCL控制器主电路拓扑。电网侧电压经3个单相FCL控制器,单相FCL控制器由单相PWM整流器和单相逆变器组成。
单相PWM整流器输出的直流电压作为3个单相逆变器的直流电源,逆变器的输出补偿由限流电抗器和负载产生的压降和谐波。L1,L2,L3为限流电抗器;G1,G2,G3为用于切出换流器的双向晶闸管;K1,K2,K3用于切出整个装置。
2.2 单相PWM整流器的控制策略
PWM整流器具有输入电流谐波含量低,功率因数高、体积小、重量轻等特点。其控制策略为:将实际直流侧电压Ud与给定期望值Uref作差,所得结果经PI控制器,其输出量乘以交流电压信号的单位量sinA,之后得到电流iref,与电感电流ia作差经PI控制器,保证了电感电流跟踪输入电压,最后产生的调制信号与三角波载波信号比较控制得到IGBT模块的驱动信号。
2.3 单相逆变器控制策略
逆变器控制分2部分,首先是对电压的跟踪控制,即逆变器的输出电压补偿因限流电抗器和负载产生的电压降落和无功损耗,然后是抑制系统中的谐波,即起到串联APF的作用,最后将上述两个调制信号进行叠加作为逆变器给定电压参考量与逆变器的实测电压作差经比例积分控制,保证了逆变器电压跟踪参考电压,最后与三角波载波信号比较控制得到IGBT模块的驱动信号。
2.3.1 电压降落的动态跟踪控制
目前对于电压降落的补偿方式主要有同相补偿、完全补偿、最小能量补偿这3种控制策略。这里采用完全补偿法。该方法可使补偿后的负载电流与理想参考电压的幅值和相位均相同,即实现了负载电压的连续性,在装置容量足够大时,它是一种理想的补偿方法。
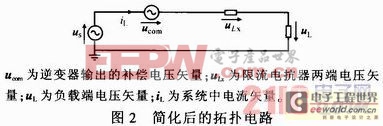
短路限流控制器与限流电抗器串联于系统中,当系统未发生暂降或暂升,且此时假设负载为阻感的,则在系统中不存在谐波影响,那么可将该拓扑简化,如图2所示。
 当系统未发生暂降或暂升,可得如图3a所示相量图。由于各物理量均随时间变化,该控制方法也是动态的,以期望的参考电压相量uref为基准,由于无暂降或暂升,因此电源电压相量us与uref重合,其中φLx为uLx与us夹角,由完全补偿法原理知,uL与us幅值和方向均相同,故图4a的四边形为平行四边形,于是可得补偿电压Ucom=-uLx。
当系统未发生暂降或暂升,可得如图3a所示相量图。由于各物理量均随时间变化,该控制方法也是动态的,以期望的参考电压相量uref为基准,由于无暂降或暂升,因此电源电压相量us与uref重合,其中φLx为uLx与us夹角,由完全补偿法原理知,uL与us幅值和方向均相同,故图4a的四边形为平行四边形,于是可得补偿电压Ucom=-uLx。
为使控制更加精确,可令△U=Us-UL,对上式加以修正,其中Us,Ucom,ULx,UL分别为us,ucom,uLx,uL的幅值,则可得逆变器输出的补偿电压为:
Ucom=-ULx+△U,φcom=-φLxh+π (1)
当系统发生电压暂降时,如图3b所示,由完全补偿法原理可知,uL与us的幅值和方向均相同,为计算补偿电压的大小,可设中间量um的有效值为Um,补偿电压相量的大小和角度的推导为:
φk=π-φs-φLx (2)


2.3.2 检测电源电流控制法
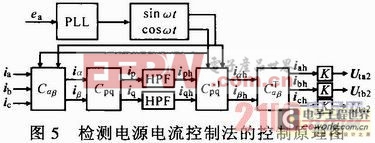
通过第一步控制方法后,负载侧电压虽得到了补偿,且效果很好,但是当系统加入非线性负载时,电流波形畸变非常严重,因此考虑用检测电源电流控制法对电流谐波进行滤除,如图4所示。
通过瞬时无功理论检测出电网谐波电流ish,然后与控制增益K相乘形成ux,即ux=Kish,理论上K值很大(但为有限值),使系统中对谐波呈高阻抗特性,从而可以隔离谐波电压源,抑制电网上的谐波电流。若在系统中提供无源滤波器支路,该支路对谐波呈现低阻抗特性,可抑制谐波电流对电网侧的影响。图5为该部分控制原理。
3 仿真结果与分析
采用PSCAD对所述控制方法进行仿真,参数为:220 V/50 Hz三相交流电压源,1 mH限流电抗器,线性负载为阻感负载,其中电感为0.1 mH,电阻为10 Ω,交流侧输入电感为1 mH,直流侧稳压电容为1 000μF。图6示出仿真波形。
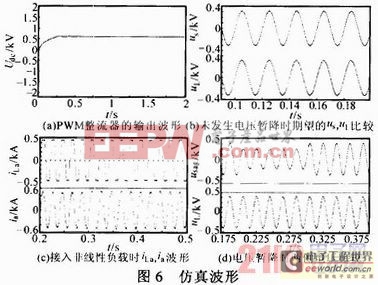
由图6a可知,控制中做选择的直流电压参考值为0.5 kV,可见0.5 s后直流电压在0.5 kV上基本保持恒定;由图6b可见,uL很好地跟踪了us;由图6c可见,虽然iLa畸变很大,但ia仍保持为正弦波;由图6d可见,在0.2~0.3 s时,系统发生电压暂降,但uL仍可保持为预期的usag,达到预期目标。 4 实验结果分析
4.1 DSP/FPGA控制器
此处装置控制器由DSP,FPGA和CPLD等构成,其中DSP模块负责完成数据的处理,与上位机(人机交互系统)的通讯,与下层结构(FPGA)的数据交换:FPGA模块完成电压、电流等各变量采样,及各变量的逻辑运算并上传数据给上层结构DSP;CPLD负责直接采集功率单元(IGBT模块)的各项数据和指标,如死区产生、温度信号采集、IGBT过压过流保护等。图7为基于DSP和FPGA构成的主控结构框图。
- μC/OS-II下通用驱动框架的设计与实现(07-23)
- 基于DSP的谐波控制器的研制(04-09)
- 数字信号控制器在变频家电中的应用(05-15)
- 基于DSP的磁流变阻尼器的控制方法(04-14)
- DSP+FPGA在高速高精运动控制器中的应用(05-17)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)