贝加莱机器人控制中的惯量前馈控制技术
时间:05-26
来源:互联网
点击:
型和,TrqFF为前馈周期写入,6AxATrqFF是采用C代码写出的前馈实现代码段。
五、控制效果
图4是实际通过BR Automation Studio的轴监测的示波器功能对整个输出进行采样得到的扭矩控制过程变化曲线,其中蓝色曲线为关闭前馈控制的情况,可以看到,其扭矩变化的波动较大;而红色曲线则表明了采用了前馈控制后的效果,明显地提高了力矩输出的稳定性。
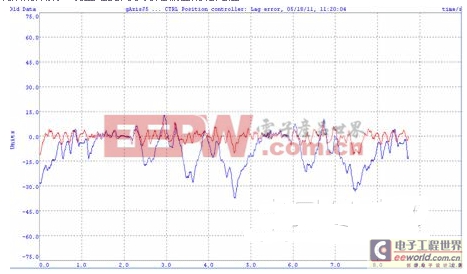
图4 前馈控制效果
该项技术代表了机器人控制技术的最高水平,所设计的机器人系统其精度更高、运行过程平稳、抖动较小,显然优于同类机器人系统的设计。
- 基于前馈控制的双馈感应电机矢量控制(08-11)
- 基于DSP的机器人视觉伺服系统研究(04-17)
- 基于DSP的自动避障小车(04-05)
- 基于DSP的双足机器人运动控制系统设计(06-21)
- 用于日本震后救援的机器人技术(03-03)
- 基于TMS32OLF2407A的教育机器人硬件系统设计 (08-21)