CAN控制器在深海测控中的应用
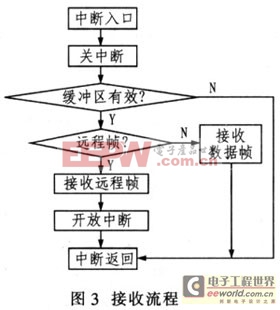
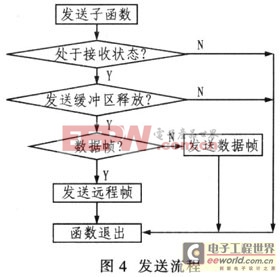
输数据速度和可靠性的影响也不是很大。 3.1单片机与CAN控制器的硬件设计 图2为C8051F020型单片机与SJA1000型控制器的硬件连接电路原理。SJA1000占用了0x8000-0x80FF的外部RAM空间。当单片机访问以上空间时片选信号会选中SJA1000。 C8051F020有高低2个外部存储器接口。因此,SJA1000的AD0-AD7连接到C8051F020的高端口P7口,CS连接到基址为0x8000的外部存储器片选信号。当C8051F020访问地址0x8000-0x80FF时,CPU可对SJA1000执行相应的读/写操作。SJA1000的RD、WR和ALE分别与C8051F020的对应引脚相连,INT接C8051F020的INT0引脚,于是C8051F020可通过中断方式访问SJA1000。SJA1000的复位信号RST为低电平有效。C8051F020的AD0-AD7口用于地址/数据的输入/输出,将其配置为漏极开路方式,利用4.7kΩ上拉电阻器拉至5V。通过设置数字交叉开关,将C8051F020的外部中断引脚配置到P2.7口。 CAN能够使用多种物理介质,例如双绞线和光纤等。该设计方案采用双绞线。信号以差分电压传送,2条信号线为CAN_H和CAN_L,静态时为2.5V,此时状态表示逻辑"1",也叫做"隐性"。CAN_H比CAN_L高,表示逻辑"0",称为"显性",此时CAN_H=3.5V,CAN_L=1.5V。TJA1050型CAN总线收发器是CAN协议控制器和物理总线之间的接口,CAN总线上二端节点须加60Ω电阻器和47nF电容器将信号吸收,以避免信号反射。为了增强CAN总线节点的抗干扰能力,SJA1000的TX1与RX1通过6N137型高速光耦后与TJA1050相连。这样就很好地实现了总线上各CAN节点间的电气隔离。其中,光耦部分电路的2个电源VCC和V_CAN必须完全隔离,否则采用光耦就是失去了意义。电源的完全隔离可采用小功率电源隔离模块和通过带多个5V隔离输出的开关电源模块实现。 3.2软件设计 通信协议采用"ID+命令+数据+校验"的形式,其中ID为网络设备的标识符,采用ID.18-ID.20。标识符ID.21-ID.28作为固定命令,不参与验收滤波。数据表示通信的具体内容。校验为1个字节,采用校验和的形式,由于CAN总线本身具有15位CRC校验,并且该系统节点数少,竞争不会很激烈,通信可靠性比较高。 软件设计思想为系统上电后C8051F020先对自身和SJA1000进行初始化以确定工作主频、波特率和输出特性等,然后接收来自甲板上位机的控制命令,同时将获取的采样参数通过SJA1000传送到CAN总线上或备份到Flash存储器中;对SJA1000的初始化设计是重点,也是难点,必须对写入每个寄存器的内容进行仔细和全面考虑,否则系统将无法正常运行。可设上位机SJA1000适配卡的ACR为xx20,AMR为FF00。水下测控中心SJA1000的ACR为xx40,AMR为FF00。 遵循上述思路,笔者采用C51编写了应用软件,下面是部分程序清单。 初始化部分: voidCAN_Init(void) {CANMODE=0x09;//进入复位模式,单向验收滤波,对SJA1000初始化 CANCDR=0x88;//选择PeilCAN模式 CANIER=0x1A;//开放接收中断、超载中 由于深海测控系统对通信的实时性要求很高,一旦接收到甲板上传来的控制命令就必须及时响应,为此从CAN总线上接收信息采用中断方式。即SJA1000无错地接收到消息后使INT变为低电平,下降沿触发C8051F020的外部中断0,使其进入中断服务程序。其流程如图3所所示。 如果要向CAN总线发送数据,则必须将符合PeilCAN帧格式的一组数据写入SJA1000的发送缓冲区,然后调用发送子函数。这里笔者采用查询方式来实现发送。流程如图4所示。 4结束语 基于SJA1000型CAN控制器的深海测控系统基本上满足了功耗低、体积小、重量轻、易扩展的要求,同时与甲板上位机之间的通信可靠,完全能满足深海探测的需要,并能广泛应用于海洋油、气田作业,海洋污染监控和防治,海上渔业生产等,前景广阔。 
- SHARC DSP与SJA1000的CAN总线接口设计(03-14)
- 基于DSP与SJA1000的CAN总线系统设计方案(07-15)
- 单片机和CAN控制器在嵌入式系统中的应用(05-05)
- 基于CAN总线控制系统的抓物机械手设计(12-20)
- SJA1000 CAN驱动程序演示实验(12-14)
- CAN总线学习系列之六——SJA1000重要的寄存器(12-14)