SHARC DSP与SJA1000的CAN总线接口设计
本文讨论了DSP与CAN控制器SJA1000的总线接口的差别,提出了SJA1000和SHARC系列DSP接口设计的简单方法和通用方法。测试表明,这种方法的稳定性好,传输效率高。
关键词: SHARC DSP; SJA1000; CAN现场总线
引言
当前,有一些微处理器将CAN控制器嵌入到系统之中,但是仍有大量人们比较熟悉的微处理器并不带有CAN控制器。采用微处理器和CAN控制器组合的设计成为必要,而且,CAN控制器具有完成CAN总线通信协议所要求的全部必要功能,因此,CAN控制器与其它微处理器的接口设计成为设计CAN总线系统的首要工作。本文重点介绍以SHARC DSP为核心的、基于SJA1000的CAN总线接口设计。
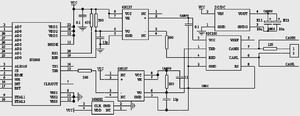
图1 SJA1000和CAN总线的连接
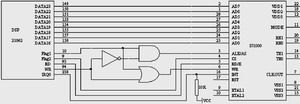
图2 ADSP21062和SJA1000的简化设计图

图3 基于CPLD的ADSP21062和SJA1000设计图
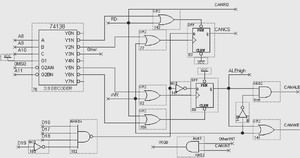
图4 CPLD的逻辑图
SJA1000简介
SJA1000是一种独立的CAN控制器,用于移动目标和一般工业环境中的控制器局域网络(CAN)。它是Philips公司早期CAN控制器PCA82C200(Basic CAN)的替代品,而且增加了一种新的工作模式(PeliCAN),这种模式支持具有很多新功能的CAN2.0B协议。
SJA1000与微处理器的接口主要由8根数据和地址分时复用线完成:AD0~AD7、ALE/AS、、/E、、、MODE和,其中MODE为接口方式选择信号,可设置成Intel方式或Motorola方式。两者的区别在于:Intel模式下,处理器对SJA1000写时,用、作为读、写数据信号,ALE下降沿锁存地址(此时地址信号要保证基本的建立保持时间),仅在读、写数据时为低;Motorola模式下,读、写信号用区分(高电平读、低电平写),用/E选通数据(下降沿锁存),AS和CS类似于Intel的ALE和。目前流行的MCS51/96系列单片机提供了方便快捷的直接Intel方式接口,出于普遍性的考虑,本文以下的接口设计都是基于Intel模式的。
DSP的接口信号和时序
与早期的处理器不同,DSP芯片的片外引脚都采用地址线和数据线分离的设计方法,不再使用地址数据分时复用线,也没有ALE信号,这样就给CAN控制器与DSP的接口带来一定困难,且不同的DSP外部引脚和时序也略有区别。要设计CAN控制器与DSP的接口,首先必须比较DSP与CAN控制器的时序。
本文选用的DSP为ADSP21062,主频为40MHz,单周期(零等待)访问存储器时,要求存储器的响应(读或写)周期小于17ns,但许多存储器或外设的响应速度没有这么快,于是就要通过加等待来延长访问时间。ADSP2106x支持两种等待方式,即内等待(软等待)和外等待(硬等待)。
SJA1000和CAN总线的连接
ADSP21062和SJA1000简化接口设计的相应程序如下:
1) #define CANADDR 0x400000
2) bit set mode2 FLG1O|FLG2O;
//设置Flag1,Flag2为输出
3) r1=0x00047800; dm(SYSCON)=r0;
//设置外部空间大小
4) r0=0x21a8c429;dm (WAIT)=r0;
//用2个软等待访问MS0
5) bit set astat ASTAT_FLG1;
//Flag1=1,
6) r0=addr;dm(CANADDR)=r0; //写入要访问的SJA1000的内部地址
7) bit clr astat ASTAT_FLG1;
//Flag1=0
8) bit clr astat ASTAT_FLG2;
//Flag2=0,CS=0
9) i0=CANADDR;r0=dm(i0,0);
//读取SJA1000相应地址的数据
10) r1=3;dm(i0,0)=r1;
//写入数据到SJA1000相应地址
11) bit set astat ASTAT_FLG2;
//Flag2=1,CS=1,5
为说明方便,对各条指令编号。运行指令5、7、8、11各花费25ns,运行指令6、9、10各花费100ns,所以完成一次读或写需300ns。
基于CPLD的ADSP21062和SJA1000接口设计
在连接多个外围设备时,其译码电路比较复杂,可以使用CPLD完成逻辑译码控制。利用地址数据信号产生CAN的ALE、CS等信号。其优点在于使用多个总线设备时,可用一片CPLD完成所有总线设备的译码,这种方法有更好的适用性。其连接方法如图3所示。
DSP的程序设计如下:
1) #define CANNCS 0x400100
//清CANCS的地址,对此地址操作使CAN的CS无效
2) #define CANCS 0x400200//置CANCS的地址,对此地址操作使CAN的CS有效
3) #define CANALE 0x400500
//置CANALE的地址,对此地址操作使CAN的ALE可变化
4) #define CANNALE 0x400600
//清CANALE的地址,对此地址操作使CAN的ALE恒为低
5) #define CANRW 0x400900
//对此地址操作完成CAN数据的读、写
6) r1=0x00047800; dm(SYSCON)=r0; //设置外部空间大小
7) r0=0x21a8c429;dm (WAIT)=r0;
//用2个软等待访问MS0
8) r7=0x07;dm(CANALE)=r7;
//ALEhigh=1,CANALE为CANWE的取反
9) r4=addr;dm(CANRW)=r4;
//写入要访问的SJA1000的内部寄存器空间地址
10) r7=dm(CANNALE);
//ALEhigh=0,CANALE总为0
11) r7=0x07;dm(CANCS)=r7;
//CANCS=0
12) r3=dm(CANRW);
//读取SJA1000相应地址的数据
13) r1=3;dm(CANRW)=r1;
//写入数据到SJA1000相应地址
14) r7=dm(CANNCS);
//CANCS=1
SHARC DSP SJA1000 CAN现场总线 相关文章:
- 中国仪控产业蕴含巨大商机,ADI DSP助跑本土军团(05-25)
- SHARC引领第四代通用DSP高端应用潮流(09-27)
- SHARC处理器满足一高二低的浮点设计需求(04-16)
- 基于ADSP-2106X SHARC DSPs软件仿真器的实现(06-27)
- 基于DSP与SJA1000的CAN总线系统设计方案(07-15)
- SHARC 2147x系列处理器具有低功耗,浮点处理精度(09-12)