微处理器智能步进电机控制卡开发方案
①抑制电源干扰。传导干扰通常由交流电源端引入系统内部。为了抑制这种干扰,系统通常在交流进线端串接入低通LC滤波器。这种方法在实际中己经取得明显效果,但为了抑制电源浪涌电压的冲击,系统还必须在电源线之间及电源线对地之间分别装压敏电阻。
②抑制传输线干扰。对于系统中传输距离较长的线路通常选用屏蔽电缆来实现系统各部分的连接,以达到抗干扰的目的。在一些应用环境比较恶劣的系统中,为了进一步抑制干扰,可采用光电隔离方式将系统控制部分与I/O口部分分开,并采用双电源供电。
③尽量减小干扰造成的影响。通常的做法有:1)增加硬件看门狗电路。2)增加电压监测电路。3)选择抗干扰能力较强的单片机系列。4)尽可能使用单片机的内部程序存储器和内部数据存储器而不使用外部总线连接这些器件。5)协调好电路中不同类型IC的电平匹配。6)数据总线和控制总线间形成板与板连接时,应加总线驱动器。
4 系统软件设计
系统的主程序由消息循环和初始化程序构成,其流程如图5所示。在系统的主程序中,初始化程序的功能是在系统复位后完成单片机各个特殊功能寄存器的设置、各数据区的初始化、外部硬件设备的设置等操作;系统的消息循环则用来实现消息合法性的判断及消息处理功能模块的调用。
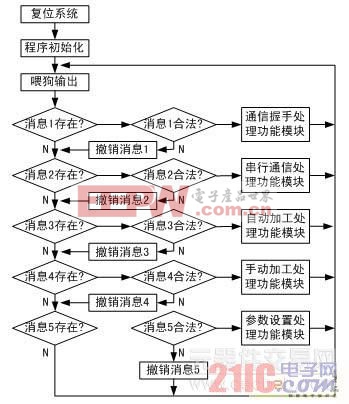
图5 系统主程序流程图
为了能够对消息的合法性进行判断,我们为消息组中的每个消息定义了对应的合法性判断标识位。如果某消息所对应的合法性判断标识位为“1”,则表示该消息是合法的消息,系统应该调用相应的消息处理功能模块对消息进行处理;为“0”则表示该消息是非法的消息,系统应该忽略该消息。为了实现“看门狗”功能,我们还在消息循环中加入了喂狗输出操作。值得注意的是,在系统的串行通信处理模块中,根据接收到的数据进行判断是自动加工,或是手动加工,还是参数设置,分别对消息序列中的标志位进行置位,以保证主程序能够正确实现各处理模块的调用。
5 本文创新点
本系统采用MCS51系列单片机对数据进行处理及对运动状态进行控制,由8254可编程定时/计数器实现脉冲的分频输出,保证了运动控制的实时性要求。为了使运动控制器能够在恶劣的环境下可靠地工作,我们采用X5045集成芯片为主要器件构成低成本、高可靠性的抗干扰电路,实现对步进电机运动控制卡的自动保护。系统投入使用以来,产生直接经济效益50余万元。
- 嵌入式软件设计中查找缺陷的几个技巧(03-06)
- 基于算法的DSP硬件结构分析(04-02)
- Windows CE下驱动程序开发基础(04-10)
- DSP+FPGA在高速高精运动控制器中的应用(05-17)
- 基于USB接口和DSP的飞机防滑刹车测试系统设计(05-19)
- 一种基于DSP平台的快速H.264编码算法的设计(05-19)