整流器数字控制与驱动技术介绍
钟输入的下降沿上即时截止。
2)tON1上述的方法通过对前一个周期的测量来确定下一个周期的动作,履行逐周控制。预期关断同步整流器MOSFET的内部时钟脉冲总数是X1或X2。内部振荡器频率(fi)越高,预期时间精度也就越高。
3STSRx系列智能驱动器ICs
STSRx系列IC是ST公司为驱动隔离SMPS中的同步整流器而专门设计的器件。该系列ICs的时钟信号从隔离变压器的次级输出获取,为驱动用作SR的1只或2只MOSFETs,输出适当的控制信号。
31STSR2
STSR2用作驱动单端正向拓扑中的两个同步整流器。该IC包含前面所叙述的控制系统,内置两个大电流N沟道MOSFET驱动器和一个时钟缓冲器等单元电路。STSR2的引脚名称及其应用电路如图9所示。
STSR2的引脚功能如下:
VCC电源电压,范围为4.5~5.5V;
PWRGND和SGLGND分别为功率信号和控制逻辑信号的参考端;
CLOCK同步信号输入;
OUTGATE1/22个大电流互补输出。由于IC自身产生死区时间,在两个开通时间之间不存在任何交迭;
SETANT2为OUTGATE2设定预期截止时间(有4种不同的期望时间可供选择);
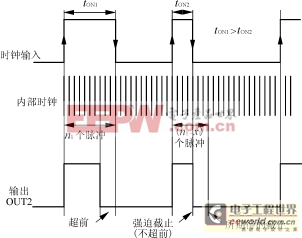
图7在tON1>tON2下的OUT1及相关波形
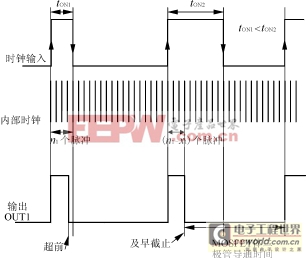
图8在tON1tON2下的OUT1及相关波形

图6在TS1tON2下的OUT2及相关波形
隔离开关电源同步整流器数字控制与驱动技术

图9STSR2在单端正向变换器中的应用
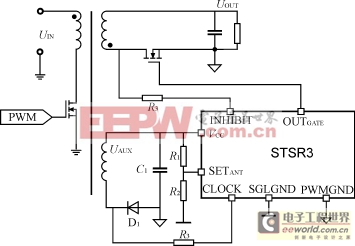
图10STSR3在回扫式变换器中的应用电路
![]()
图11STSR4在双端拓扑结构中的应用电路
INHIBIT当该脚输入高于非常低的一个门限电压时,OUTGATE2使能。在正向变换器应用中,迫使OUTGATE2的接通时间减至最小。
32STSR3
STSR3是为驱动在回扫式拓扑中的一个SR而专门设计的控制IC,其引脚名称(符号)及应用电路如图10所示。STSR3与STSR2比较,主要区别是STSR3仅有一个大电流栅极驱动输入(OUTGATE)。
33STSR4
STSR4是指定用于驱动推挽、半桥或全桥式双端输出拓扑结构中SR的控制IC。该器件的典型应用电路如图11所示。STSR4含有两个大电流N沟道MOSFETs驱动器输出,同时有两个时钟输入(CLOCK1和CLOCK2),分别接收来自隔离变压器次级绕组上的时钟信号。
STSR2、STSR3和STSR4在不同类型的隔离式拓扑结构应用中,都是从变压器的次级输出获得时钟信号,对作为SR使用的一只或两只MOSFETs产生恰当的栅极驱动信号,完全解决了在控制SR中易于出现的全部问题,有效地提高了系统稳定性和可靠性。
4结语
在隔离SMPS拓扑中,用于驱动SR的数字控制/驱动技术,相对于需要附加磁复位技术的所谓“自驱动同步整流”方法来说,具有许多优点。数字控制方法主PWM控制器在初级侧的SMPS隔离拓扑中,为利用直接来自于变压器次级输出的同步数据提供了便利。数字控制方法所提供的驱动信号数值,总是能与MOSFETs的栅极范围相一致,可使MOSFETs体二极管的导通时间尽可能短。通过采用一些附加技术,能允许变换器在DCM操作。采用数字方法,有效地解决了被认为与SR驱动信号产生有关的“跨越导通”和“贯通”等关键问题。
采用带有较少引脚的STSRx系列ICs,可使SR数字控制电路大为简化。对于ICs外部元件,其中包括SETANT脚外部用作设定预期时间的电阻,在精度和温度特性等方面没有严格的要求。STSRx系列ICs,对于来自变换器开关频率和占空比的突然变化,具有快速瞬态响应特性。
所有其它有关SR控制的技术,如模拟控制方法等都存在不少缺点。其控制电路中的很多元件,诸如电容器等,要求具有严格的容差和稳定性。而利用锁相环(PLL)技术,也需要大量元件,且同步器件带有较多的引脚。另外这种控制方法,对于开关频率和占空比的扰动,瞬态响应速度也相对比较慢。
STSRx系列ICs的推出,为SMPS隔离拓扑中同步整流器的控制与驱动,提供了有效的手段和便利。
- 用DSP实现高功率因数PWM整流器的控制(01-23)
- 三相PWM整流器启动冲击的抑制(09-12)
- 高功率因数PWM整流器的控制实现(09-07)
- 基于DSP控制的电压型PWM整流器(04-26)
- 采用空间矢量控制技术的三相电压型整流器设计(04-24)
- 基于DSP储能飞轮用无刷直流电机的数字控制系统(06-08)