三相PWM整流器启动冲击的抑制
三相PWM整流器具有直流电压可控、功率因数高、网侧电流畸变小等优点,广泛应用于新能源发电、电动汽车充放电站等领域。目前常用的三相整流器控制策略有基于d,q旋转坐标系的直(间)接电流PI控制,基于反馈线性化的三相PWM控制法,三相PWM整流器的H∞鲁棒控制等。其中,基于d,q旋转坐标系的直接电流PI控制结构清晰、实现简单,响应速度快,且设计步骤可参考传统的PI设计经验,得到了广泛应用。直接电流PI控制应用于三相整流器时,会在启动时导致较大的冲击电流,增加了功率器件的电流应力,对器件选型及工作可靠性产生了很大影响。
针对三相PWM整流器的启动冲击问题,这里介绍了启动瞬间PI控制器的调节过程,建立了系统的动态模型,在此基础上给出了冲击电流峰值的计算公式,指出了产生启动冲击的原因和影响因素,分析了PI参数对冲击电流大小的影响,并提出了一种新型软启动算法,通过仿真和实验验证了理论分析的可行性。
2 三相PWM整流器控制与建模
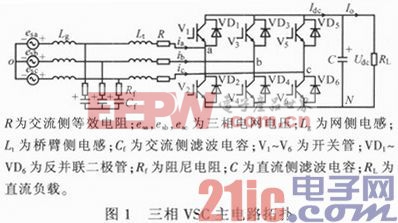
三相PWM整流器的主电路拓扑为三相半桥电压源型变换器(VSC),如图1所示,主要由LCL滤波器、三相桥臂及直流侧电容组成。
忽略R,经d,q坐标变换,系统状态方程为:
Ldid/dt=ud-ed, Ldiq/dt=uq-eq (1)
式中:ud,uq分别为桥臂电压d,q轴分量;L为Lg和Lt之和;id,iq分别为有功、无功电流分量;ed,eq分别为电网电压d,q轴分量。
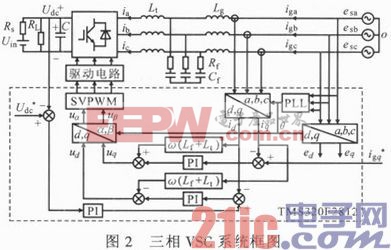
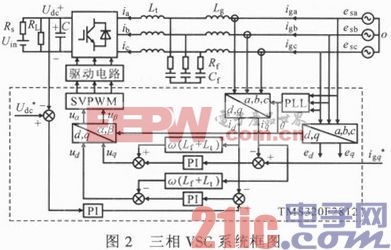
图2示出系统的控制框图。当整流器正常工作时,将旋转坐标系的d轴与电网电压矢量进行同步。此时eq=0,初始条件下uq=0。假定误差及扰动均较小,则根据式(1)可知在启动过程中iq不会产生冲击。因此,在单位功率因数状态下,ed和ud是影响系统启动冲击的关键因素。
3 启动冲击分析
整流器启动瞬间电压环离散PI控制器输入输出关系表达为: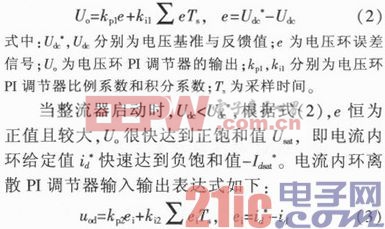
式中:kp2,ki2分别为电流环PI调节器比例系数和积分系数;![]() ,id分别为有功电流给定值与反馈值;uod为电流内环输出;ei为电流环误差信号。
,id分别为有功电流给定值与反馈值;uod为电流内环输出;ei为电流环误差信号。
假定轻载启动, ,则id逐渐增大,ei恒为负。由式(3)可知,此阶段uod为负。设电流环PI调节器输出参考电压矢量在d轴上投影的最大值为Umax,则ud与uod的关系为:
,则id逐渐增大,ei恒为负。由式(3)可知,此阶段uod为负。设电流环PI调节器输出参考电压矢量在d轴上投影的最大值为Umax,则ud与uod的关系为:
Udc在启动瞬间可近似为恒定,则uod与ud成线性关系,其比例系数为 。此时ed为正常数,根据式(2)~(4),ud为负值,ud-ed的绝对值很大,id快速下降。在id从零降到
。此时ed为正常数,根据式(2)~(4),ud为负值,ud-ed的绝对值很大,id快速下降。在id从零降到![]() 的过程中,ud的值取决于电流环PI调节器中kp2,ki2的大小关系,且保持为负值。当id=
的过程中,ud的值取决于电流环PI调节器中kp2,ki2的大小关系,且保持为负值。当id=![]() 时,ei=0,若此时ud仍未达到ed,id将继续下降并超过
时,ei=0,若此时ud仍未达到ed,id将继续下降并超过![]() ,直到ud=ed时,id达到峰值。此后ud会超过ed,根据式(1)可知,此时id开始上升,并达到
,直到ud=ed时,id达到峰值。此后ud会超过ed,根据式(1)可知,此时id开始上升,并达到![]() 。之后,直流侧电压逐渐达到稳态,过程如图3所示。为方便观察,图中有功电流及其给定均用绝对值表示。Idsat为电流环给定饱和值,I0为有功电流初始值,Ipeak为有功电流峰值。
。之后,直流侧电压逐渐达到稳态,过程如图3所示。为方便观察,图中有功电流及其给定均用绝对值表示。Idsat为电流环给定饱和值,I0为有功电流初始值,Ipeak为有功电流峰值。

可见,kp1,ki1对启动冲击影响有限,kP2,ki2对启动冲击具有较大影响,为简化公式,用kp和ki替代kp2和ki2。由于采用数字控制器,故各状态方程均为离散,列写系统差分方程,可求得冲击电流峰值:
4 启动冲击的抑制方法
图4示出三相整流器系统框图。其中,GPI(s)为电流环PI调节器传递函数,其表达式为:
GPI(s)=kp+ki/s (6)
1/(Ts+1)为采样延迟,整流器传递函数为:
GPWM(s)=kPWM/(0.5Ts+1) (7)
GLCL(s)为LCL滤波器传递函数,由于启动冲击为低频响应,LCL滤波器可等效为单L滤波器,故低频下GLCL(s)满足:
GLCL(s)=1/(R+LsS) (8)
式中:Ls=Lg+Lt。

启动冲击是由负常量ed和动态响应超调量两部分引起的电流冲击共同组成,故可在电流环中加入前馈量ed和第一个采样周期的比例输出,并引入高通滤波负反馈法来分别解决这两部分冲击,则此时电流环PI调节器输出初始值为:
可见,kp,kPWM下降均会导致超调量上升。当系统稳定工作时,由于直流侧为阻容放电回路,稳态加载时直流侧电压变化较慢,每个采样周期电流环给定值增量较小,冲击较低,PI参数取值范围较宽,所以设计参数时为保证带LCL滤波器的整流器不发生谐振并尽量降低损耗,PI调节器的kp往往取值较小。但整流器启动时直流侧电压远低于稳态时直流电压,电流环给定为阶跃饱和信号,且此时kPWM下降,超调量大幅上升。因此可在电流内环中加入高通滤波负反馈环节,则改进后的电流内环控制回路如图5所示。

其开环、闭环传递函数分别为:

相对于普通的基准斜坡缓起控制方法,电网电压初值前馈法无需进行PI参数的切换,提高了系统的稳定性和可靠性。
5 仿真和实验验证
基于上述分析,搭建基于Matlab/Simulink的18 kW三相整流器仿真模型,直流侧额定工作电压700 V,交流电网电压220 V/380 V/50 Hz,交流侧滤波电感分别为1.8 mH和1.2 mH,输出滤波电容20μF,开关频率5kHz。启动时id动态响应如图6a所示,调节时间约为0.03s。
- 新型DMOS三相PWM电机驱动器A3936特点及应用(09-07)
- 用DSP实现高功率因数PWM整流器的控制(01-23)
- 整流器数字控制与驱动技术介绍(09-07)
- 高功率因数PWM整流器的控制实现(09-07)
- 基于DSP控制的电压型PWM整流器(04-26)
- 采用空间矢量控制技术的三相电压型整流器设计(04-24)