用74HC240制作寻光机器人
光源前进,只是在步态上增加了一些不必要的转弯,换句话说就是机器人以一种之字形的路线,忽左忽右振荡着前进。

图1 斯密特触发器寻光机器人系统框图
改进版的控制核心
图2为改进版的寻光机器人,核心部分由一对光敏二极管和74HC240集成电路构成。74HC240是一片功能强大的三态缓冲器,芯片内部集成了8路带有施密特触发器输入特性的反向缓冲器。在数字计算机中,这类缓冲器的作用是用来暂时存放处理器送往外设的数据,有了数控缓冲器,就可以使高速工作的CPU部分与慢速工作的外设起协调和缓冲作用,实现数据传送的同步。这个改进版的寻光机器人,因为有了74HC240的加盟,使得机器人的控制系统即可以继承到上文所介绍的施密特触发器的全部好处,又可以借助缓冲器的作用,来协调机器人电子部分与机械结构之间的配合。实际制作完成以后的机器人运行方式,介于模拟控制与数字控制之间,因此它的设计者也给它起了一个形象的名字“Bare Bones Photovore”,我把它翻译为“准系统寻光机器人”。线路图中的U1和U2分别各代表了74HC240芯片内一组并联工作的驱动器。
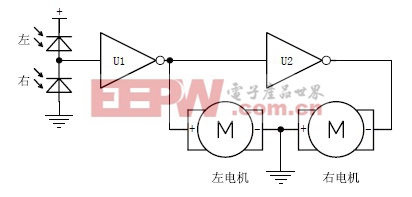
图2 74HC240寻光机器人线路图
图3是74HC240的框图,可以看到芯片内部由两组带有使能输入端的反向缓冲器组成,输入端和输出端分别为A1, A2, A3,A4, B1, B2, B3, B4(对应管脚2, 4, 6, 8, 11, 13, 15, 17);YA1,YA2, YA3, YA4, YB1, YB2, YB3, YB4(对应管脚 18, 16, 14, 12, 9, 7,5, 3)。使能输入端为Enable A, Enable B (对应管脚1, 19),电源正(对应管脚20),电源地(对应管脚10)。
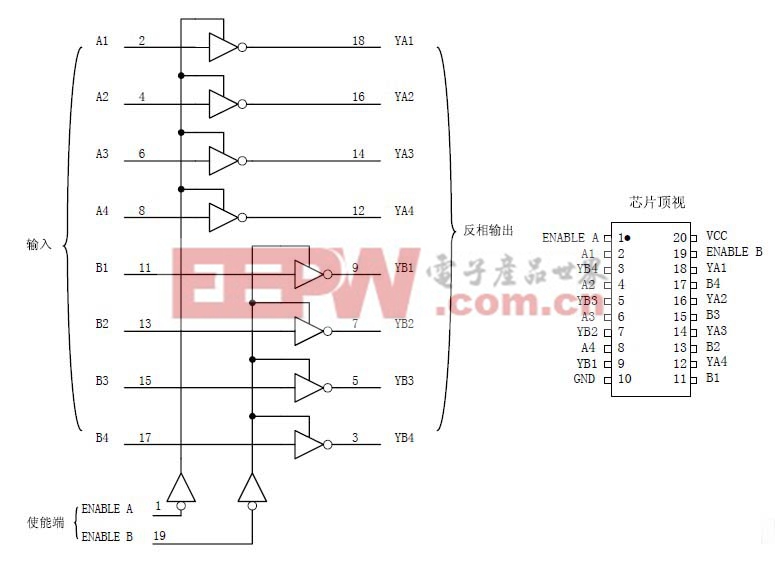
图3 74HC240内部图
缓冲器分为两种,常规缓冲器和三态缓冲器。常规缓冲器总是将值直接输出,用在推进电流到高一级的电路系统。三态缓冲器除了常规缓冲器的功能外,还设置有使能输入端,这里对应的是74HC240的第1脚和第19脚。从图4的真值表中可以看出当使能端电平不同时缓冲器有不同的输出值。当Enable A,Enable B=0时,芯片选通,缓冲器工作;当Enable A, EnableB=1,缓冲器被阻止,无论输入什么值,输出的总是高阻抗状态,用Z表示。高阻抗状态能使电流降到足够低,以致于类似缓冲器的输出没有与任何电路相连。

图4 74HC240真值表
在这部寻光机器人里,74HC240内部的缓冲器是工作在选通状态,故需要把芯片的第1脚、19脚接低电平(电源地),另外还需注意,74HC240内部缓冲器的单路输出电流只有35mA,在实际应用中,需要多组缓冲器并联以获得足够的输出电流,才能驱动减速电机安全有效的工作。我在制作中,使用2片74HC240,16只缓冲器分成两组各8路并联,U1和U2的输出端可以获得最大280mA的输出电流,足已驱动常见的小型减速电机。由此可以规划出一个系统的实际接线图,对制作很有帮助,见图5。
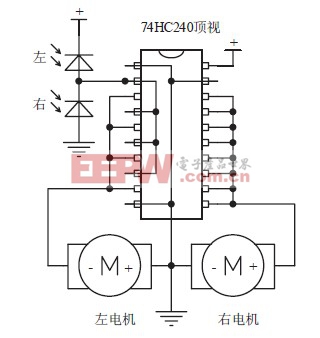
图5 74HC240寻光机器人接线图
机器人的实际制作
下面是我制作74HC240寻光机器人的过程。因为74HC240机器人移动平台的结构和制作方法与上一期的NE555寻光机器人相同,这里不再鳌述。见表1。

电子控制部分的全部材料,与NE555寻光机器人相同,依然使用红外线接收管作为光敏器件,把它们反相串联,接在+3.7V电源与地之间。为了使控制部分获得足够的输出电流驱动电机,需要使用两片74HC240,把它们叠加焊接在一起工作。
控制核采用BEAM仿生机器人常用的“DEAD BUG”的焊接方式。使用这种手法建造电路的特点是把集成电路管脚朝上,在管脚上进行外围元件的搭棚焊接,它好处是可以迅速搭建起一个功能电路,另外完成的作品兼具一点艺术性。
我们可以把图6看做一个硅基的大脑,从电路功能和表现形式上都比较符合。注意把需要的连接外部设备的端口留出适当的长度,方便搭焊导线。图7为安在机器人头部的“大脑”特写,为了美观和增加气氛,我用塑料包装板给它做了透明盖。
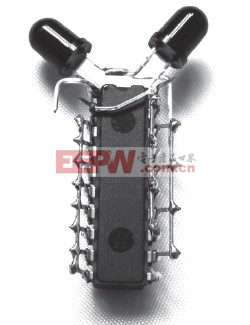
图6 为焊接完毕的控制核,顶视图

图7 机器人的大脑
图8为机器人底部,锂电池直接粘在减速电机上。因为74HC240的工作电压范围比较宽2~6V,这样在电源的选择上就很灵活,可以使用我偏好的3.7V锂电池。而NE555的最低工作电压是4.5V,在电源的选择上就有很大的局限性。图9为总体装配完毕的74HC240寻光机器人。

图8 机器人底部

图9 74HC240寻光机器人
机器人的运行效果
74HC240寻光机器人的运行效果要优于NE555寻光机器人。根据光线的变化,机器人的步态呈现出一种不规则的步进形式,非常类似单片机控制下的PWM电机驱动效果,只是74HC240机器人的步态完全是自发的。通过仔细的观察,机器人的主要行为模式可以总结为:当它向
- 基于DSP的机器人视觉伺服系统研究(04-17)
- 基于DSP的自动避障小车(04-05)
- 基于DSP的双足机器人运动控制系统设计(06-21)
- 用于日本震后救援的机器人技术(03-03)
- 基于TMS32OLF2407A的教育机器人硬件系统设计 (08-21)
- 基于DSP的覆冰机器人控制系统设计(02-13)