智能伺服驱动滤除机械共振
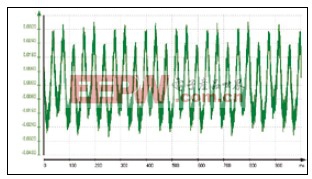
图1 振荡图显示了机械系统的不稳定性。
第一步就是通过进行“白噪声”测试来找到振动频率。使用Rexroth公司的集成驱动指令值生成器(图2),可以在电机的扭矩指令输入信号中施加一个噪声信号。使用预先指定的放大倍率,指令值生成器会以随机的频率输出正向和反向扭矩,因此电机将会发生振动,产生类似于TV或无线电的白噪声。不使用锤子或者棍棒敲击,电机就能在较宽的频率区间上对机械结构产生“冲击”,我们可以藉此来观察在哪些频率的冲击下响应要高于其他冲击频率。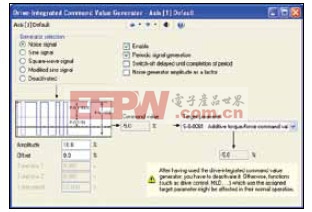
图2 白噪声测试能够发现共振频率。使用Rexroth公司的集成驱动指令值生成器, 将噪声信号施
加到电机的扭矩指令输入上。图像来源:BoschRexroth 公司。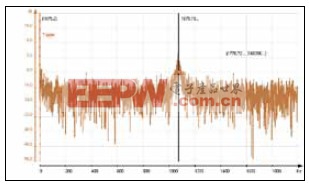
图3 随着电机的振动,将这些数据采集下来并上 传给Rexroth 公司的IndraWorks 工程套件的示波 器界面,然后以时间作为横坐标对其进行显示。为 了确定频域,选择一组FFT(快速傅立叶变换) 图,并以频率作为横坐标显示。图像来源:Bosch Rexroth 公司。
找到共振频率之后,可以使用速度回路滤波器来最小化共振对于控制回路的影响。除了能够平滑时间常数(低通滤波器),驱动器还能够提供其他的滤波选项,最多可以同时采用4个滤波器。对于此测试,频率已经足够高了,所以仅仅使用低通滤波器就足够了。不过问题频率通常会落在200-300Hz的频率区间,在此区间内有效的低通滤波器通常也会对速度回路产生影响,对于直驱电机来说这点尤为明显,因为速度回路的带宽刚好覆盖了干扰频率。此时就不易使用这种“粗犷”的方法,更有针对性的解决方案是聚焦于问题频率,同时使对于频谱内问题频率之外的其他频率区间的影响最小化。最佳解决方案是带阻滤波器,有时也被称为陷波滤波器。
带阻滤波器使用中央频率和带宽作为设置参数,中央频率附近的信号衰减极大,但是对于带宽中其他区间的衰减就很有限(图4)。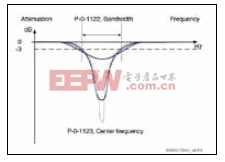
图4 位于中央频率附近的信号被极大地衰减了。
图5 基于白噪声测试的结果,选择 一个中央频率为1075Hz、带宽为 100Hz 的滤波器。默认值100Hz 的 效果通常就可以接受,只要滤波器一 开始工作,蜂鸣声就会显著降低。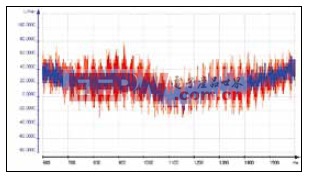
图6 观察施加滤波器前后的速度反馈。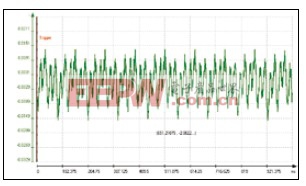
图7 结果所示为降低后的位置偏差。
- DSP和PBL3717A构成的步进电机的控制系统(04-01)
- 基于TMS320F2812的DSP控制器设计及应用(04-15)
- 基于DSP的无刷直流电机调速系统(06-01)
- 基于DSP控制的三电平变频器的研究(08-10)
- 基于TMS320F240控制步进电机的调焦系统设计(10-20)
- 基于DSP的无刷直流电机伺服系统设计(03-14)