3 G网络的移动机器人远程监控系统
时间:04-23
来源:互联网
点击:
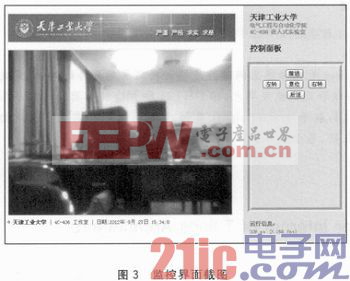
为了使页面呈现出动态效果,如显示当前时间、视频数据传输速率等,页面将嵌入Javascript代码。整个界面分为两个区:视频显示区和控制面板区。视频显示区显示视频流服务器传输上来的视频数据,控制面板区通过按钮与CGI串口应用程序交互控制电机驱动板。
Javascript是一种流行的通用脚本语言,基于Javascript可以实现用户与页面的交互,并响应页面上发生的事件。
HTML表单是Web文档的一部分,用来将信息从浏览器传递到服务器,它提供多种接收输入的方法,包括单选按钮、多选框、文本框等,表单以form>标签开始,以/form>标签结束。本系统控制面板的按钮采用“button”输入类型。传统的HTML表单需要通过提交按钮(“subm it”)来发送表单数据,数据以名/值对的形式发送至服务器端的CGI程序。本系统的每个按钮都需要实时提交,如果通过传统方法来实现,则需要对每个按钮配对一个不同名的提交按钮,这样会使页面代码变得更复杂,因此本系统使用Ajax方法。使用Ajax创建HTML表单时,不再需要提交按钮来发送表单数据,对于每个按钮,只要在属性中添加事件处理函数onClick(),就能在点击按钮时触发Ajax建立浏览器和服务器CGI应用程序间的通信,实现代码如下:
结语
本文所介绍的系统在实验中获得了较好的结果,视频图像的传输具有较好的稳定性,为了提高图像的连续性,可以通过修改代码提高摄像头的采集频率。该移动机器人平台可以根据实际需要进行功能扩充,并可以通过本文所阐述的方法,对控制面板的功能进行相应的扩展,比如摄像头的调焦、温湿度显示、机械手臂运动控制等。
- 基于DSP的机器人视觉伺服系统研究(04-17)
- 基于DSP的自动避障小车(04-05)
- 基于DSP的双足机器人运动控制系统设计(06-21)
- 用于日本震后救援的机器人技术(03-03)
- 基于TMS32OLF2407A的教育机器人硬件系统设计 (08-21)
- 基于DSP的覆冰机器人控制系统设计(02-13)