基于模糊控制的有源滤波器直流母线电压控制
2.2 常规PID控制方法 3 仿真分析 4 结束语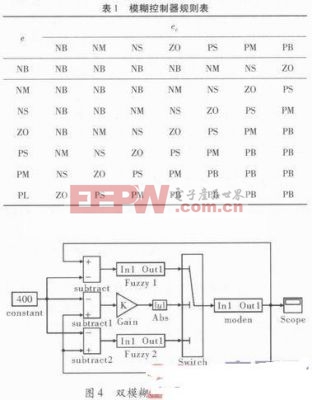
双模糊控制器仿真模型如图4所示。
其中控制器的切换由误差的大小控制,切换原则如下:当实际测量值与设定值之间的偏差>e0时,选择开关自动选取模糊控制器1,即进行粗调,相反,实际测量值与设定值之间的偏差e0时,选择开关自动选取模糊控制器2控制,即进行微调。
将模糊控制器1输入e,ec的变化范围定义为模糊集上的论域e,ec={-3,-2,-1,0,1,2,3}实际的电压误差e和ec的范围是[200,400]可以通过简单的归一化计算,得到如上的输入论域范围。
同理,通过归一化计算将模糊控制器2的输入e,ec的变化范围定义为模糊集上的论域e,ec={-3,-2,-1,0,1,2,3},实际的电压误差e和ec的范围是[0,200]。
模糊控制器1和模糊控制器2的内部封装如图5和图6所示。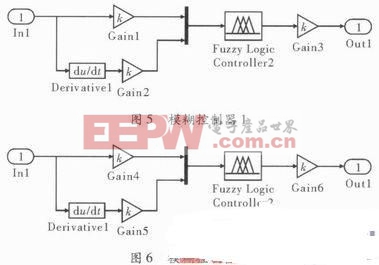
目前,在APF中对直流电压的控制通常采用常规的PID控制,为比较两种方法的控制效果,在Matlab/Simulink仿真环境里,结合并联电压型有源滤波器模型,建立直流侧电压的常规PID控制仿真模块,如图7所示,Uf是直流侧总电压的给定值,Ur是直流侧总电压的反馈值,两者之差经PID调节后得到调节信号Ud,它叠加到有功电流ip上。使得有源电力滤波器的补偿电流中包含一定的基波有功分量,使电网向有源电力滤波器的直流侧补充能量,将直流侧电压维持在给定值。
本文分别采用双模糊复合控制方法与传统PID控制方法对直流母线侧电压进行控制,在Matlab/Simulink中对APF直流母线电压进行仿真实验。仿真参数如下:(1)PID控制器参数为Kp=1,Ki=0.1,Kd=10。(2)模糊控制器的误差、误差的变化的量化因子和输出的比例因子K1=0.03 K2=0.2,K3=30,K4=0.02,K5=0.3,K6=25。(3)电容器容量为6 800μF,直流母线参考电压Uf=400 V。
仿真波形如图8和图9所示。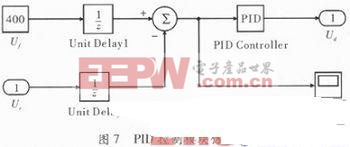
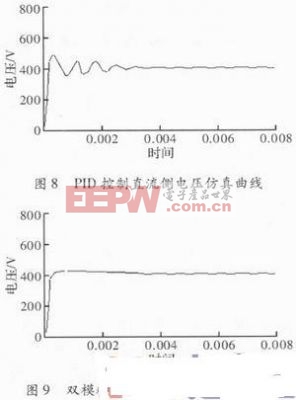
从仿真结果可以看出,双模糊控制与常规的PI控制相比动态响应更快、超调小、静态误差小,其控制效果明显好于PID控制方法。
直流侧电容电压的控制关系到整个滤波器的性能。本文对传统直流侧电压控制方法存在超调量和静差较大的问题进行了分析,设计了双模糊控制器,该控制方法减少了非线性因数的影响,使得系统超调量和静差也有了较大的改善。同时该控制器具有超调小、响应速度快、静差小的特点。仿真结果证明了该控制系统具有良好的控制效果。
- 用CPLD实现FIR数字滤波器的设计(08-07)
- 用8位微处理器实现数字低通滤波器设计(05-15)
- 基于LabVIEW的DSP设计(04-10)
- DSP滤波器用于扩展数字化仪器的性能(01-25)
- 基于DSP的并联电力有源滤波器的仿真研究(02-08)
- 基于DSP的滞环跟踪型有源电力滤波器数字控制系统(02-21)