基于模糊控制的有源滤波器直流母线电压控制
针对传统直流侧电压控制方法存在超调量和静差较大的问题,设计了混合有源电力滤波器控制系统,建立了混合有源电力滤波器的系统模型,并针对直流侧电压控制设计了一套双模糊控制器,与传统直流侧电压控制方法相比,该控制方法具有超调小、响应速度快、静差较小的特点。仿真结果验证了该方法的正确性和可行性。
关键词 混合有源电力滤波器;直流侧电压;双模糊控制器
随着大量非线性负载接入电网,谐波问题成为影响电力系统安全和电能质量的重要因素,电力谐波治理日益受到重视。
目前对APF直流侧电压多是采用PI控制或模糊控制,但PI控制依赖于系统精确的数学模型,鲁棒性差、易引起电压超调和电流冲击;模糊控制不依赖被控对象的数学模型,稳态效果也比常规的PI控制效果好,但缺点是动态过程中直流侧电压控制效果不理想。
文中建立了混合有源电力滤波器的仿真模型。针对直流侧电压控制系统设计了一套双模糊控制器。仿真结果表明,该有源电力滤波器能有效地消除谐波电流,同时具有良好的动态补偿特性。
1 源滤波器工作原理及主电路设计
混合有源滤波器的基本原理是从补偿对象中检测出谐波电流,由补偿装置产生一个与该谐波电流大小相等而极性相反的补偿电流,从而使电网中只含有基波,达到滤波的目的。
并联混合有源电力滤波器原理如图1所示。该混合型有源电力滤波器由LC无源滤波器和有源滤波器两部分组成。混合型APF以电压型逆变器作为其有源部分,与无源部分和负载并联接入电网。

特定次谐波主要由无源滤波器消除,采用多个单调谐滤波器组成,单调谐滤波器的调谐频率根据被补偿对象的谐波成分确定,无源滤波器可由5次、7次和11次单调谐滤波器构成。
APF系统由指令电流运算电路、电流跟踪控制电路、驱动电路和主电路组成。工作原理是:通过检测负载电流Ll和电网电流Is,提取其中的谐波电流,进而通过控制三相半桥逆变器输出与谐波电流相反的补偿电流Ic,最终使Is趋近于正弦。
2 直流侧电压控制方法
2.1 双模糊控制方法
本文提出了一种直流母线电压的双模糊控制方法。该方法由于控制器的增多,改善了控制性能,使系统的控制时间、动态响应加快、稳态误差变小,并且算法实现简单,满足多种负载变化情况下的直流母线电压控制要求。
双模糊控制器的设计思想是从人工调节中的粗调、细调乃至微调中得到启发而来,其结构如图2所示。
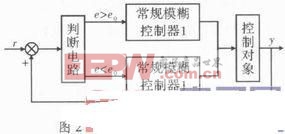
双模糊控制器的优点在于可根据不同的运行条件,自动在模糊控制器1和模糊控制器2之间切换,这样可以在保证系统控制精度的前提下,达到提高系统快速性、增强控制鲁棒性的目的。
双模糊控制器实现自动切换的原则定义如下:当系统电容侧电压的变化量△U大于设定值e0时,由模糊控制器1进行控制,可提高系统动态响应性能;系统进入稳态后,电容侧电压的变化量△U小于设定值e0时,切换到模糊控制器2进行控制,可更好地消除系统的稳态误差,提高系统的稳态性能。其中,控制器的切换由电压误差△U及其误差变化率du/dt控制。该控制器在保证系统控制精度的前提下,实现提高系统速度、增强控制鲁棒性的目的。其中△U为直流母线电压与其参考值的偏差。
模糊控制器根据每个采样时刻的参数偏差及变化趋势,基于专家知识建立的模糊规则库,对系统作出迅速且有效的判断,通过适当加大或减小控制力度来实现稳定控制。
模糊控制器一般只有偏差和偏差变化率两个输入量,本文中的双模糊控制器均采用二维模糊控制器,该模糊控制器以误差和误差的变化率为输入变量,以控制量的变化为输出变量。由前文对有源电力滤波器直流母线电压控制原理的讨论,选择当前的电压Ur与参考电压Uf的偏差△U及其变化率(du/dt)为模糊输入变量,选择模糊输出变量为电网注入APF主电路的有功电流控制量Ud(△ip)。
模糊输入量e、ec定义为
e(k)=Uf-Ud(k)
ec(k)=e(k)-e(k-1) (1)
其中,Ur(k)为k时刻的直流母线电压;Uf为参考电压。
在其论域上取7个语言变量,定义语言值为:{Positive Big(PB),Positive Medium(PM),Positive Small(PS),Zero(ZO),Negative Small(NS),Negative Medium(NM),Negative Big(NB)}。
对模糊输入e、ec和输出u进行模糊化,建立模糊子集为e,ec,u={NB,NM,NS,ZO,PS,PM,PB}
模糊控制规则是模糊控制的核心,因此,如何建立模糊控制规则成为一个关键的问题。本文采用MAX-MIN推理合成规则,运用IF-THEN形式的模糊条件语句,单元集模糊化重心法,输入变量和输出变量均采用三角形隶属度函数。输入变量e、ec和输出变量u对应的隶属度函数如图3所示。
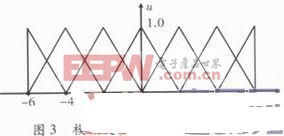
该模糊控制器调节过程如下:当实际测量值远小于设定值时,则大幅增加控制量;当实际测量值远大于设定值时,则大幅减小控制量;当实际测量值和设定值正负偏差不大时,则根据实际测量值的变化趋势来确定控制量的大小。模糊控制器规则如表1所示。
- 用CPLD实现FIR数字滤波器的设计(08-07)
- 用8位微处理器实现数字低通滤波器设计(05-15)
- 基于LabVIEW的DSP设计(04-10)
- DSP滤波器用于扩展数字化仪器的性能(01-25)
- 基于DSP的并联电力有源滤波器的仿真研究(02-08)
- 基于DSP的滞环跟踪型有源电力滤波器数字控制系统(02-21)