基于工业以太网的运动控制系统
进行交换。
远程的web用户发出控制指令和设置参数给本地的被控制系统,本地的控制系统执行该指令,并将执行情况返回给web用户。客户端只需安装通用的浏览器,用户在客户端通过浏览器,向伺服系统的web服务器提出控制请求。web服务器对用户进行身份验证,并根据用户的请求,执行相应cgi(common gateway interface)或asp(active server page)扩展程序与伺服系统的控制计算机通信,伺服系统执行命令,并把运行过程和结果提交给web服务器。web服务器利用http协议把运行结果通过主页形式返回给客户端。控制计算机还可以把运行过程中的数据和结果存入web服务器的实时数据库,以便用户查询。
4 网络伺服系统的硬件线路介绍
南工大网络化伺服实验系统硬件连接线路如图3所示,该系统的硬件要求:
工业pc机(pentium 4)、双绞线回路、匹配电阻(120欧姆数量2)、伺服驱动器bassoon(数量4)、伺服电动机(数量4)、二轴工作台(数量2)、运动控制器(maestro 数量3)、交换机一台、工业触摸屏(pws6600c-s)、24v电源一个、交流接触器一个、交流滤波器一个、控制柜一个。其中,非熔丝断路器用来保护电源线,过电流时切断电路;噪声滤波器起防止外部杂波进入电源线的作用,并且可以减轻电机产生的杂波对外界的干扰;磁力接触器的作用是接通/断开电机的主电源;电抗器是为了减少主电源中的谐波。
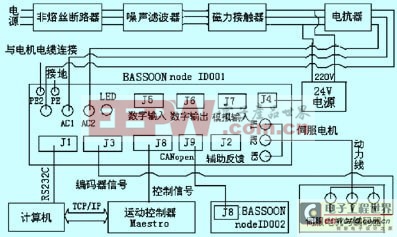
图3 硬件线路连接图
bassoon内部电子原器件需要24v电源驱动,同时散热风扇也需要一个24v直流电源供电,因此本系统采用了一个24v开关电源。bassoo交流伺服驱动器,经过pwm逆变后输出三相uvw驱动电机。
由图3的硬件线路图可知,上位pc机通过以太网和运动控制单元maestro相连,maestro的can接口与下面的具有can接口(j8、j9)的伺服驱动用相双绞线连接,构成多轴分布式运动控制系统。由于双绞线有所谓近端串扰,即在发送线对和接受线对之间存在电磁耦合干扰,因此需要在两端各加一个120ω的终值电阻。
5 结束语
ethernet是当前流行的网络通讯技术,但它仅定义了网络的物理层,在多年前己放弃了为运动控制接口建立标准的多供应商协议。同时以太网采用的是异步通讯机制,如果要将它用于运动控制必须增加光交换器,其成本将提高的很多。本文提出的以太网和现场总线相结合的方案是目前网络化运动控制系统的主选方式[5]。现场总线可以很好地满足控制系统对实时响应的较高要求,同时使现场总线还使得系统具有很好的扩展性能。以太网是目前最流行的因特网接入方案之一,它在发挥现场总线优点的同时解决了现场总线难以接入因特网的问题。
- 基于Linux的嵌入式测控系统设计(07-03)
- 工业以太网布线与故障保养(12-21)
- 工业以太网在制丝线电控系统的应用(12-21)
- 工业以太网交换机应用于太阳能热电控制系统(12-21)
- 基于工业以太网EtherCAT的DCS控制系统设计(12-21)
- 基于工业以太网和PROFIBUS的FCS实时在线故障诊断系统(12-21)