基于工业以太网EtherCAT的DCS控制系统设计
0 引言
基于以太网的通讯系统已经成为工业自动化技术的发展趋势。其更快的通讯性能可以获得更短、更紧凑的控制循环,更好的和更高的产品品质。EtherCAT(Ethernet for Control Automation Technology)技术于2003年由德国BECKHOFF自动化公司提出,2007年12月被国际电工委员会制定为IEC61158-12(Typel2)国际标准,并在短短几年内获得了巨大的发展。其更高的性能,更低的成本,灵活的拓扑结构,使得EtherCAT技术在工厂自动化和流程自动化领域都得到了广泛应用。
北京和利时电机技术有限公司和北京航空航天大学用EtherCAT通信实现现场设备层数据通信,开发出DCS(Distributed Control System,集散型控制系统)系统设备层现场总线,可以大幅度提高DCS系统设备层现场总线的数据传输能力,并设计了一套实例系统。
1 EtherCAT技术
EtherCAT使用主从模式介质访问机制(MAC Media Access Contr01),主站发送以太网帧到各从站,数据帧遍历所有的从站设备,如图1所示。从站并不是存储数据包之后再进行处理,而是在数据帧传输的过程中从数据帧中抽取数据或将数据插入数据帧,同时将数据帧传输到下一个EtherCAT从站。最后一个EtherCAT从站发回经过完全处理的数据帧,并由第一个从站作为响应报文发送给控制单元。整个过程只有几纳秒的延迟。
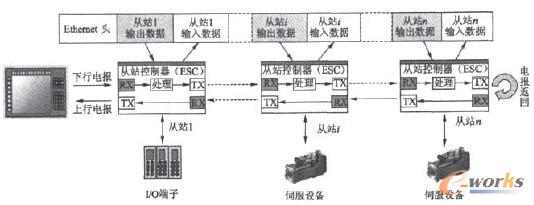
图1 EtherCAT工作原理图
EtherCAT数据直接使用以太网数据帧传输,数据帧使用以太类型0x88A4,也可以用UDP/IP协议格式数据传输EtherCAT数据,使用UDP端口0x88A4。EtherCAT数据包括2个字节的数据头和44-1498字节的数据。数据区由一个或多个EtherCAT子报文组成,报文结构如图2所示。

图2 EtherCAT数据帧结构
每个子报文对应独立的设备或从站存储区域,包括子报文头、数据域和相应的工作计数器(WKC,Working Counter)。子报文结构如图3所示。子报文结构定义如表1所示。

图3 子报文结构
表1 子报文结构定义

EtherCAT主站可由PC计算机或者其它嵌入式计算机实现,使用PC计算机构成EtherCAT主站时,通常用标准的以太网网卡NIC(Network Interface Card)作为主站硬件接口。主站功能一般由软件实现。从站使用专门的EtherCAT从站控制器ESC(EtherCAT Slave Controller)。借助于从站中的EtheTCAT专用芯片和主站中读取网卡数据的DMA(Direct Memory Access,直接存储器访问)技术,整个协议处理过程都在硬件中进行。EtherCAT主站最多可以在30 u s内刷新1000个I/O 2.1主控制器(EtherCAT主站)点,可以在300μS内交换一帧多达1486个字节的协议数据,这相当于12000个数据量的输入输出。控制100个输入输出数据均为8字节的伺服轴只需用100μS。EtherCAT的数据帧处理机制允许在EtEtherCAT网段内的任一位置使用分支结构,同时不打破逻辑环路。分支结构可以构成各种物理拓扑,如线型、树型、星型、菊花链型,以及各种拓扑结构的组合。
EtherCAT物理层使用标准的以太网物理层器件,如100BASE-TX双绞线,100BASE-FX光纤或LVDS(Low Voltage Differen-Tial Signaling,低压差分信号传输)。使用100BASE-TX电缆时站间距离可以达到100米,而LVDS的物理层只能保障10米的传输间距。整个网络最多可以连接65535台设备,可以认为网络的容量是无限的。
2 基于EtherCAT的DCS演示系统设计
该DCS遵循经典DCS的硬件体系结构,分为中央控制器、主控制器单元和输入输出设备三层硬件网络。其中,中央控制器作为人机接口(Human Machine Interface,HMI)设备,可以管理和操作整个控制系统;主控制器单元(Main Control Unit,MCU)包括了Ethe疋AT主站功能,向输入输出设备发送控制指令、采集现场数据并与中央控制器进行数据交换;输入输出设备,BPEtherCAT从站,分别具有控制不同现场设备的能力,包括I/O开关量控制、伺服电机控制和模拟量输入输出控制。中央控制器与主控制器单元间的系统网络层通过标准以太网Ethernet完成通信,实现面向DCS的集成要求;主控制器单元与现场的输入输出设备间的现场设备层采用EtherCAT总线技术,可以进行具有实时处理性能的高速大容量通信控制。
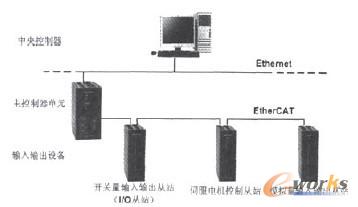
图4 演示系统硬件结构
2.1 主控制器(EtherCAT主站)
主控制器单元是现场控制站的中央处理单元,实现演示系统中EtherCAT的主站功能。主控制器使用嵌入式计算机PCM-3353采用LX800/500MHz处理器,拥有512 MB内存空间,承担输入输出设备的控制逻辑运算等任务。主站功能完全由软件实现。其主要任务有:
1)控制任务:主要实现用户程序功能,完成用户规定的功能,输入初始化时需要设置的设备参数,输入控制数据,进行
工业以太网EtherCATDCS控制系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)