汽车轮速传感器设计中CAN总线的应用
汽车电子网络按功能可分为面向控制的网络(CON)和面向信息传输的网络(ION)。按网络信息传输速度,美国汽车工程师协会(SAE)将网络分为A, B,C三类。A类为低速网,波特率在9600bps以下,进而波特率在125kbps以下为中速网B类,125kbps以上为高速网C类。车轮速度(即车轮绕轮轴旋转的线速度)传感器(简称轮速传感器)信号,可供发动机控制模块、防抱制动系统(ABS)控制模块及仪表控制模块共享,使车辆在制动过程中,防抱制动控制模块和发动机控制模块联合控制,达到最佳制动效能。发达国家虽已普遍使用ABS系统,但对轮速信号处理的方法以硬件和软件的形式作为ABS系统的电子控制器(ECU)的一部分而制成专用电路和芯片加以保护。国内对轮速信号的处理大多存在轮速识别的门槛值过高(车速即车体的速度低于10km/h时就无法正确测量车轮速度)的问题。
笔者利用研制的转鼓轮速传感器试验台进行试验,针对轮速传感器产生的信号特点,设计了基于CAN总线的汽车轮速传感器信号处理电路,并用单片机对此信号采集、量化。结果显示:设计出的轮速传感器系统具有轮速测量门槛低(车速达3km/h)、工作可靠、抗干扰能力强等优点,同时,可作为CAN总线局域网的测点,实现传感器信号的数字化、网络化的变送。
轮速传感器
由于磁电式传感器工作稳定可靠,几乎不受温度、灰尘等环境因素的影响,所以,目前在汽车中使用的轮速传感器广泛采用变磁阻式电磁传感器。变磁阻式轮速传感器由定子和转子组成。定子包括感应线圈和磁头(为永久磁铁构成的磁级)两部分。转子可以是齿圈或齿轮两种形式。齿轮形式的转子如图1(a)所示。磁头固定在磁极支架上,支架固定在长轴上,齿圈通过轮毂、制动毂连为一体,长轴穿过车轮与内部的轴承配合,如图1(b)所示。

转子的转速与车轮的角速度成正比。转鼓带动车轮转动,传感器转子的齿顶、齿间的间隙交替地与磁极接近、离开,使定子感应线圈中的磁场周期性的变化,在线圈中感应出交流正弦波信号。控制试验台使车轮运转在各种工况,对传感器输出信号进行测量。实验结果表明了变磁阻式轮速传感器产生的信号具有如下特征:
(1)传感器产生的信号为接近零均值的正弦波信号;
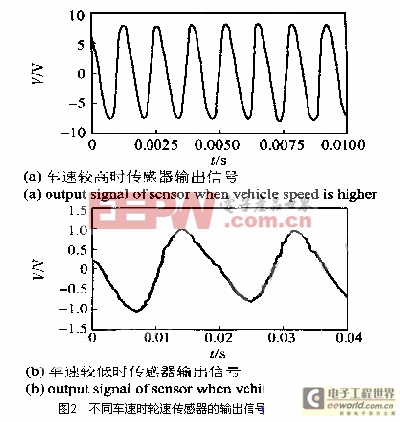
(2)正弦波信号的幅值受气隙间隔(磁头与齿圈间的气隙,一般在1.0mm左右为最理想)和车轮转速的影响。气隙间隔越小,车轮速度越高,正弦波信号的幅值越大;
(3)正弦波信号的频率受齿圈的齿数和车轮转速的影响,为每秒钟经过磁头线圈的齿数,即等于齿圈齿数乘以每秒钟的轮速。变磁阻式轮速传感器所产生的信号如图2所示。
试验模拟的是BJ212车型的前轮,用转鼓转速模拟车速。当控制转鼓转速为3km/h时,88齿的传感器产生正弦波信号的幅值约为1V,其频率为 31Hz;当控制转鼓转速为100km/h时,传感器产生的正弦波信号的幅值约为7V,其频率为1037Hz。由于齿轮加工产生的毛刺和其它环境因素的影响,实际信号为在上述信号中叠加了一定频率成分干扰信号,见图2(b)。
轮速信号的检测
将轮速传感器输出的每个正弦波信号调理整形产生一个方波信号,后续电路对方波信号的处理可有以下几种方法:(1)直接送单片机的T0记数,用T1作定时器。在每个T1定时时间内读出T0的记数值,经计算得到轮速;(2)将方波信号先进行F/V转换,再由单片机A/D转换而得到轮速;(3)方波信号送单片机的外部中断/INT0引脚,将其设定为边沿触发方式,用T1作定时器对方波信号进行周期测量,经计算得到轮速。第一种方法在低速时所测得的轮速误差较大。假定轮速不变,每个T1定时时间读一次T0的记数值,在T1i和T1i+1时间内读得数值由于读数时磁头与齿顶的位置关系有时会相差1,轮速较低时, T1定时时间内T0的记数值较小,因而相对误差较大,导致轮速识别的门槛值过高。第二种方法可提高低速时的测量准确度,但增加了硬件F/V和A/D转换芯片的开支。第三种方法可以在不增加硬件开支的前提下,有效地提高低速时的测量准确度。
轮速传感器系统硬件
轮速传感器系统的硬件以80C31单片微机为核心(外部扩展8kRAM和8kEPROM)。外围电路有信号处理电路、总线控制及总线接口等电路。其结构框图如图3所示。

轮速传感器产生信号经滤波、整形、光电隔离后,送80C31的/INT0输入引脚。T1作定时器使用,对脉冲信号进行周期测量。SJ
- 支持网络传感器的嵌入式操作系统设计(11-10)
- 一种基于DSP的张力、深度、速度测量系统(04-15)
- 基于TMS320F2812的DSP控制器设计及应用(04-15)
- 基于DSP的数字式MEMS加速度传感器的设计与应用(04-17)
- 基于ADSP-BF533的家庭安全系统设计(03-26)
- 基于MSP430单片机的电子汽车限速器的研究(08-20)