一款基于DSP的循迹及自平衡的智能小车设计
摘要:本系统选用TI公司32位DSPTMS320F28027作为控制芯片,设计制作了一款能够循迹并寻找平衡的智能小车。根据所给定的跑道和跑道上的位置标志对小车进行硬件设计和程序编写。循迹分为前后各4路循迹,采用的是4路红外循迹模块,保证了小车能够前进后退均在指定路线上。
关键词:TMS320F28027芯片;红外循迹;倾角传感器;模数转换器
引言
本系统选取了32位TMS320F28027作为运动物体的控制中心。TMS320F28027具有丰富的资源,拥有32位架构、高级外设、高度的模拟集成、高达128 KB的快闪存储器,同时还包括功能强大的ADC、高分辨率PWM以及湿著增强的捕获单元等众多特性优异的组件、高精度片上振荡器、模拟比较器、上电复位与掉电保护等在内的各种集成模块。本文以电动车跷跷板的设计为例,介绍了TMS320F28027的PWM电机调速、A/D采样、中断和I/O口等的操作和控制,以及LCD、L298n、红外循迹等外部扩展硬件的连接技巧和方法。
1 小车功能介绍
1.1 按键和显示功能
按键操作:使用3个按键分别进行选择、确认、退出功能操作,在系统上电后,显示界面进入主菜单,通过“选择”按键埘“板上寻平衡”、“上板寻平衡”两个功能进行选择,选定结束按下“确认”键,系统进入对应函数,此时可以按下“退出”键退出对应的功能函数。
显示功能:LCD实时显示小车的倾角和小车正在执行的功能,成功完成一项操作后LCD给出“OK”的指示,同时在每项操作进行时显示其操作所用时间,完成所有任务后显示出每项操作所耗时间。
1.2 “板上寻平衡”功能
在不加配重的情况下,电动车完成以下运动:
①电动车从起始端点A出发,快速行驶到中心点C附近;
②电动车在中心点C附近尽快使跷跷板处于平衡状态,保持平衡5 s,并给出明显的平衡指示;
③电动车从步骤②中的平衡点出发,快速行驶到跷跷板末端B处(车头距跷跷板末端B不大于50 mm);
④电动车在B点停止5 s后,快速倒退回起始端A,完成整个行程;
⑤在整个行驶过程中,电动车始终在跷跷板上,并分阶段实时显示电动车行驶所用的时间。
其中,到达C点附近和倒退回A点有红外循迹装置配合循迹标志完成,寻找平衡主要由倾角传感器检测小车状态控制小车前后移动完成。
1.3 “上板寻平衡”功能
将配重固定在可调整范围内任一指定位置,电动车完成以下运动:
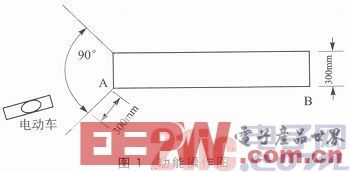
①将电动车放置在地面距离跷跷板起始端A点300 mm以外、90°扇形区域内某一指定位置(车头朝向跷跷板),电动车能够自动驶上跷跷板,如图1所示。
②电动车在跷跷板上取得平衡,给出明显的平衡指示,保持平衡5 s以上。
③将另一块质量为电动车质量10%~20%的块状配重放置在如图2所示中A至C间指定的位置,电动车能够重新取得平衡,给出明显的平衡指示,保持平衡5 s以上。

1.4 跑道和小车介绍
(1)小车跑道
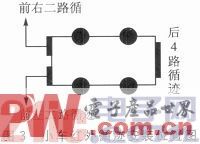
跑道分为两个部分:矩形部分的跷跷板和扇形部分的地面区域。图2中两侧箭头代表循迹标识,跷跷板中间箭头为后退的循迹标识。在跷跷板中部C点放置跷跷板支架,保证跷跷板可自由摆动。
(2)小车循迹模块安装位置
主要介绍小车循迹模块的安装位置,以保让小车能够正确循迹。前进循迹由小车前部左右各两路的红外循迹装置完成,位置配合跷跷板上前进循迹线安装。后退循迹由小车后部的4路红外循迹装置完成,位置配合跷跷板上后退循迹线安装。安装位置如图3所示。
2 功能模块电路连接
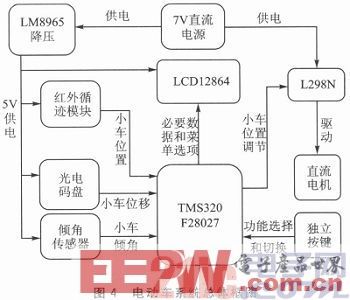
2.1 系统总体模型
TI公司32位DSP TMS320F28027为系统的控制芯片,系统通过7 V稳压直流电源给电机供电,同时7 V稳压电源经LM8965稳压模块输出5V电压后给其他模块供电。在上电过后使用独立按键配合LCD12864实现功能选择,选择功能结束,小车在红外循迹模块的引导下到达指定地点开始寻找平衡,此时系统对倾角传感器输出电压进行A/D采样并将数据传输给芯片处理,然后芯片输出信号对L298N驱动的直流电机进行调节,配合光电码盘控制小车在跷跷板上移动以实现平衡点寻找。系统框图如图4所示。
2.2 L298N驱动连接电路
L298N是一块双H桥直流电机驱动芯片,主要是对直流电机进行PWM转速调节,对步进电机进行PWM细分操作。驱动部分的端子电压Vs在+5~+35 V,承载最大电流为2 A;逻辑部分的工作电压为5~7 V,电流为0~36 mA,低电平有效值为-0.3~1.5 V,高电平有效值为2.3 V~Vss。该驱动板可驱动2路直流电机,使能端ENA、ENB为高电平时有效,设置IN1和IN2的输入电平确定电机的转动方向,改变输入使能端PWM脉冲的占空比实现调速。
DSP TMS320F28027 相关文章:
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)