基于PSoC?4 的PMSM无传感器矢量控制
时间:09-23
来源:电子产品世界
点击:
化和配置PSoC®4的内部资源,然后进入主循环。主循环主要检测用户的起停命令和速度给定,决定电机的运动状态;并完成一定的调试输出功能。FOC主算法全部在PWM中断中完成,主要完成读取ADC采样结果,完成坐标变换,PID控制,SVPWM输出及更新占空比等操作。具体流程图如图5所示。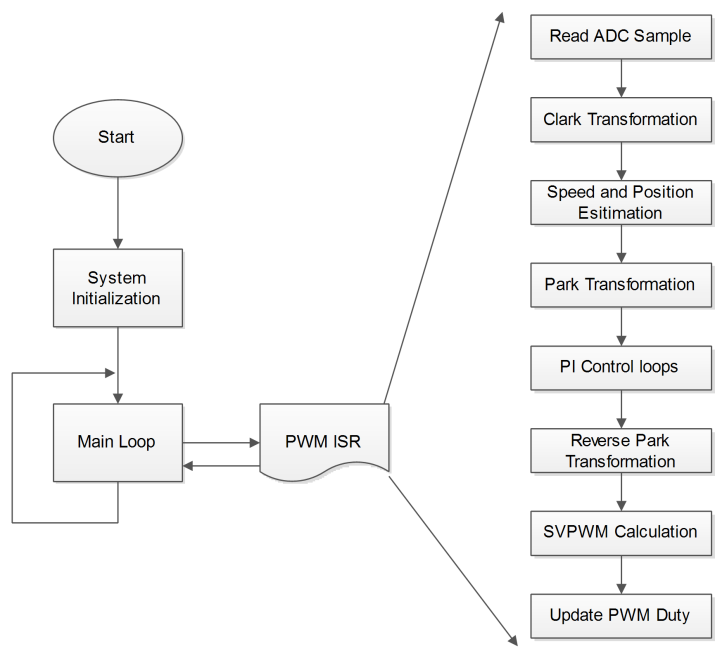
图5 程序流程图
3) 实验结果
在PSoC Creator环境下编译工程,并连接PSoC4开发板,三相全桥驱动板与PMSM电机,通电后电机可正常运行。图6显示了电机相电流波形。从测试结果可以看出,电流波形平滑,正弦度很好。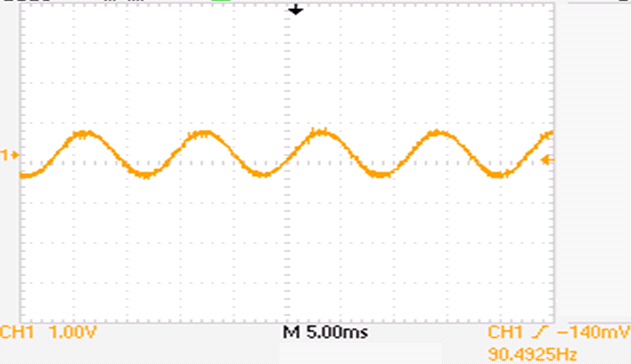
图6 相电流波形图
2. 小结
上述实例介绍了如何在PSoC®4 平台上实现PMSM无传感器矢量控制。PSoC®4作为Cypress最新推出的产品,针对电机控制做出了富有特色的优化。凭借片内丰富的资源及高度的灵活性,用户可以轻松设计出高度集成化、低成本、性能优越的PMSM矢量控制系统,提高产品的核心竞争力。
参考文献
[1]. PSoC® 4: PSoC 4100 Family Datasheet
[2]. PSoC® 4: PSoC 4200 Family Datasheet
[3]. PSoC® 4 Architecture TRM
[4]. PSoC 4100/4200 Family PSoC® 4 Registers TRM (Technical Reference Manual)
[5]. AN79953 - Getting Started with PSoC® 4
- 基于CY8C3866的无线脑电信号采集检测系统设计(06-24)
- 解读USB控制器芯片及其在图像采集中的应用(06-06)
- 基于PSoC?4的矢量控制方案 :电流采样(06-04)
- 基于CYUSB3014高速实时数据采集系统的设(04-23)
- 一款基于CYPRESS的USB3.0总线设计(03-19)
- 一种基于PSoC的汽车中控台面板设计(03-10)